
 Vítejte, dnes je
úterý
30.
červen
2026
Vítejte, dnes je
úterý
30.
červen
2026

Použití ultrazvukových měničů pro měření vzdálenosti
Ultrazvukové měření a detekci vzdálenosti lze zajistit pomocí ultrazvukových měničů, doplněných o jediný operační zesilovač a mikroprocesor se čtyřmi volnými I/O piny, a vnitřním integrovaným komparátorem.
Základní princip měření je přitom velmi prostý. Ultrazvukový vysílač je na krátkou dobu vybuzen kmitočtem 40 kHz – ideálně jen po dobu několika pulzů tohoto kmitočtu. Obdélníkový impulz o délce od jedné až do několika vlnových délek základního kmitočtu může být řízen přímo uvnitř mikrokontroléru. Vzniklý ultrazvukový pulz se následně odráží od všech předmětů v okolí, které mají hustotu větší než vzduch, a jako část emitovaných pulzů se vrací zpět do přijímače. Čas, který uplyne mezi vysláním a příjmem, lze snadno převést na vzdálenost s pomocí známé rychlosti šíření zvuku v daném prostředí.
Zvuk pro svůj přenos vyžaduje odpovídající médium, kterým může být vzduch, voda nebo například ocel. Obecně platí, že čím vyšší je hustota přenosového média, tím rychleji se v něm vlny šíří. I rychlost šíření zvukových vln ve vzduchu se liší v závislosti na teplotě prostředí, vlhkosti či nadmořské výšce. Při pokojové teplotě může být jako výchozí hodnota považována konstanta 343 m/s. Ta je přímo ideální pro použití v případě časování s mikrokontroléry při měření doby odrazu vyzářeného impulzu v typickém rozsahu jednotek metrů.
Typ a materiál odrazné plochy přitom není rozhodující. Frekvence 40 kHz se jako zvuková vlna dobře odráží téměř od všech povrchů. Výhodnější je však kolmý kontakt s povrchem, kdy impulzy nejsou vychýleny a putují zpět, přímo k přijímači. Pokud se úhel dopadu na povrch zvětší, sníží se podíl energie pulzů odražených zpět do přijímače.
Ultrazvukový měnič pracuje podobně jako piezoelektrický bzučák, ale na vyšší, neslyšitelné frekvenci. Základní princip je však naprosto stejný. Průchod elektrického proudu piezoelektrickým zařízením způsobuje jeho deformaci nebo ohyb. Po odeznění elektrického proudu se prvek vrátí zpět do svého původního tvaru. Je-li na svorky ultrazvukového měniče přiveden obdélníkový signál o kmitočtu 40 kHz, jsou vyzařovány akustické vlny téhož kmitočtu. Na opačném principu pak pracuje ultrazvukový přijímač. Ten na svých výstupech generuje napětí vzniklé vybuzením od příchozího ultrazvukového signálu, avšak s výrazně nižší amplitudou.
Ultrazvukové měniče přitom mohou být buď vysílačem, přijímačem, nebo obojím. Z mechanického hlediska je pak nejzásadnější dělení na otevřený, nebo uzavřený (vodotěsný) typ. Následující konstrukce využívá samostatný přijímač a vysílač otevřeného typu. Ty jsou nejjednodušší na použití. V případě vodotěsných měničů je pro jejich vybuzení nutné vyšší napájecí napětí.
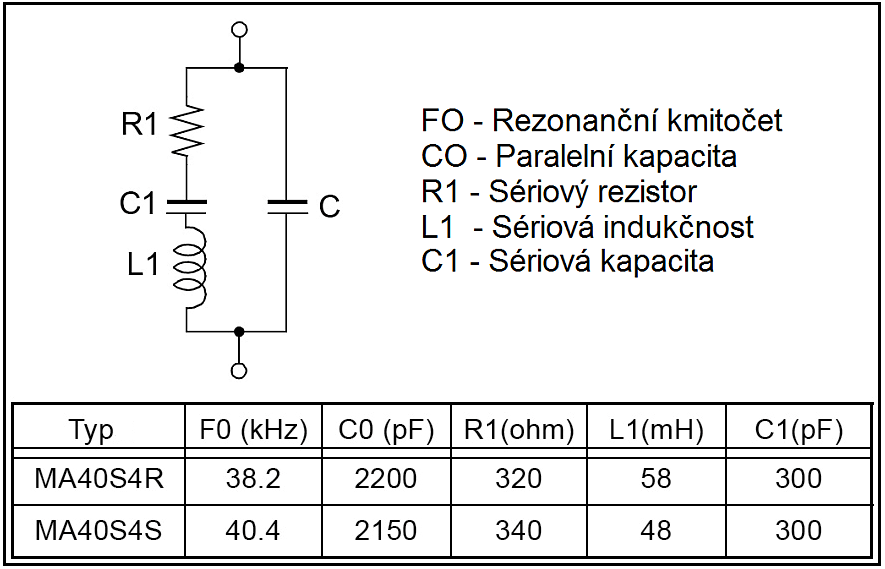
Obr. 1 Náhradní schéma ultrazvukového měniče
Obr. 1 ukazuje náhradní schéma ultrazvukového měniče. Převažujícím prvkem je kapacitní zátěž, ale protože jsou součástí také další indukční a kapacitní aspekty, je celý obvod naladěn na rezonanční frekvenci 40 kHz. Vysílač je vyladěn pro maximální výkon, zatímco přijímač je naladěn na maximální výstupní napětí při vstupním signálu 40 kHz. Díky tomu je v obvodu zajištěn filtrační účinek pro všechny okolní frekvence, který je užitečný pro eliminaci šumu při zesilování přijímaného signálu. Typické hodnoty jednotlivých prvků vybraných typů součástek jsou uvedeny v dolní části obr. 1.
Buzení ultrazvukové zařízení
Pro napájení kapacitního ultrazvukového vysílače je ideální použít diferenciální signál, který zde může zajistit největší úroveň energie při zachování 0,0 V offsetu na vstupních svorkách. Některé typy měničů přitom mohou mít potřebu použití i záporného napájecího napětí.
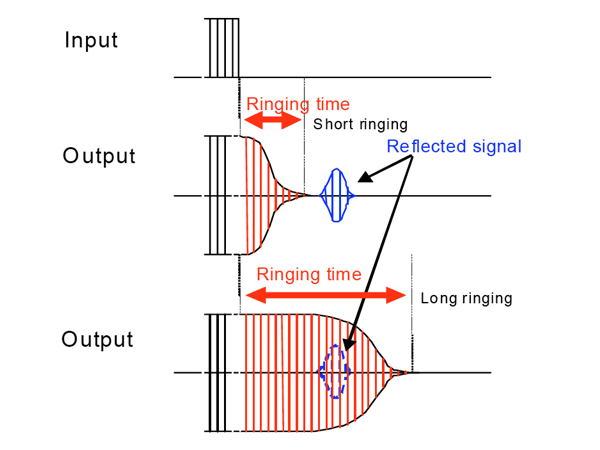
Jedním z hlavních problémů ultrazvukových vysílačů je však jejich dozvuk. To znamená, že součástka kmitá i nějaký čas po vypnutí napájecího signálu. Tato vlastnost vychází z mechanické rezonance celé součástky. Zařízení je totiž na danou ultrazvukovou frekvenci naladěno podobně jako zvon, který má také jistý dozvuk po tom, co odezní jeho buzení. Dalším problémem pak může být i vazba mezi vysílačem a přijímačem. V okamžiku,
kdy vysílač produkuje ultrazvukový signál, je do přijímače přenášen nejen vzduchem, ale také například přes desku plošných spojů, a tváří se zde jako přijímaný signál. V praxi se to řeší jednoduchou pauzou mezi vysláním signálu a aktivací přijímače, která má za cíl potlačení parazitních vazeb mezi vysílačem a přijímačem. Přijímač je aktivován až po doznění vysílače, takže reaguje pouze na odražený signál. Nevýhodou je, že tato prodleva ovlivňuje minimální detekovatelnou vzdálenost, viz obr. 2.
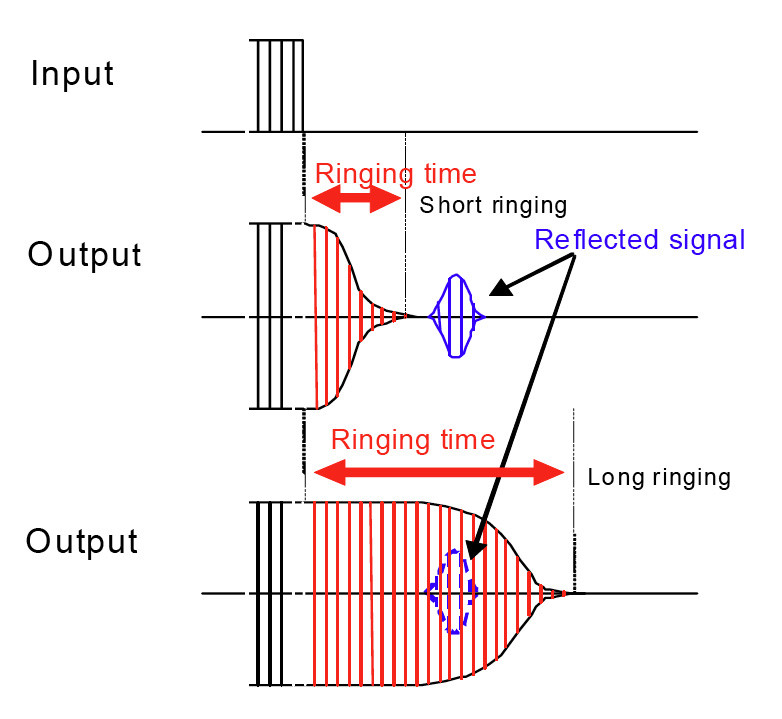
Obr. 2 Ultrazvukové zařízení
Ultrazvukový vysílač by měl být poháněn frekvencí co nejbližší jeho rezonanční hodnotě, aby tak bylo dosaženo co nejvyššího vyzářeného výkonu. Typický 8MHz interní oscilátor mikrokontrolérů Microchip, například typu PIC16F690, může být přitom snadno dělen přímo až na hodnotu 40 kHz. Pro vytvoření diferenciálního signálu 40 kHz, který by mohl přímo napájet ultrazvukový vysílač, stačí použít dva volné I/O piny mikrokontroléru PIC. Aby však generování signálu zbytečně nezatěžovalo výkon MCU, je k tomu využit integrovaný čítač/časovač Timer0 a přerušení od přetečení.
Alternativou ještě více automatizovaného způsobu generování ultrazvukového signálu je pak použití modulu ECCP, dostupného v mnoha typech PIC MCU. Modul lze konfigurovat tak, aby PWM výstup dané frekvence byl dostupný na dvou pinech, P1A a P1B, v režimu half-bridge, s jedním výstupním invertorem. Modul ECCP pro stanovení časové základny PWM výstupu používá Timer2. Povolení Timer2 post-scaler umožňuje uživateli navíc nastavit počet generovaných impulzů, než dojde k nastavení příznaku přetečení. To umožňuje generovat kompletní ultrazvukový impulz pouze s jediným přerušením.
Jakmile je ultrazvukový signál vytvořen a vyslán z ultrazvukového vysílače, dalším úkolem je jeho zachycení a detekce času návratu odraženého signálu. Přijatý ultrazvukový signál je velmi slabý a je třeba ho zesílit před tím, než by mohl být detekován pomocí komparátoru. K tomu však postačí i jediný operační zesilovač, zapojený nejlépe v konfiguraci rozdílového zesilovače.
Diferenciální zesilovač
Příklad obvodu rozdílového zesilovače je uveden na obr. 3. Obvod operačního zesilovače zesiluje napětí z ultrazvukového přijímače, který je připojen mezi oba vstupní piny. Výstupní šum a nežádoucí rušení jsou potlačeny vhodným nastavením odpovídajících vstupních klidových proudů pomocí rezistorů R2, R4 a R1, R3.
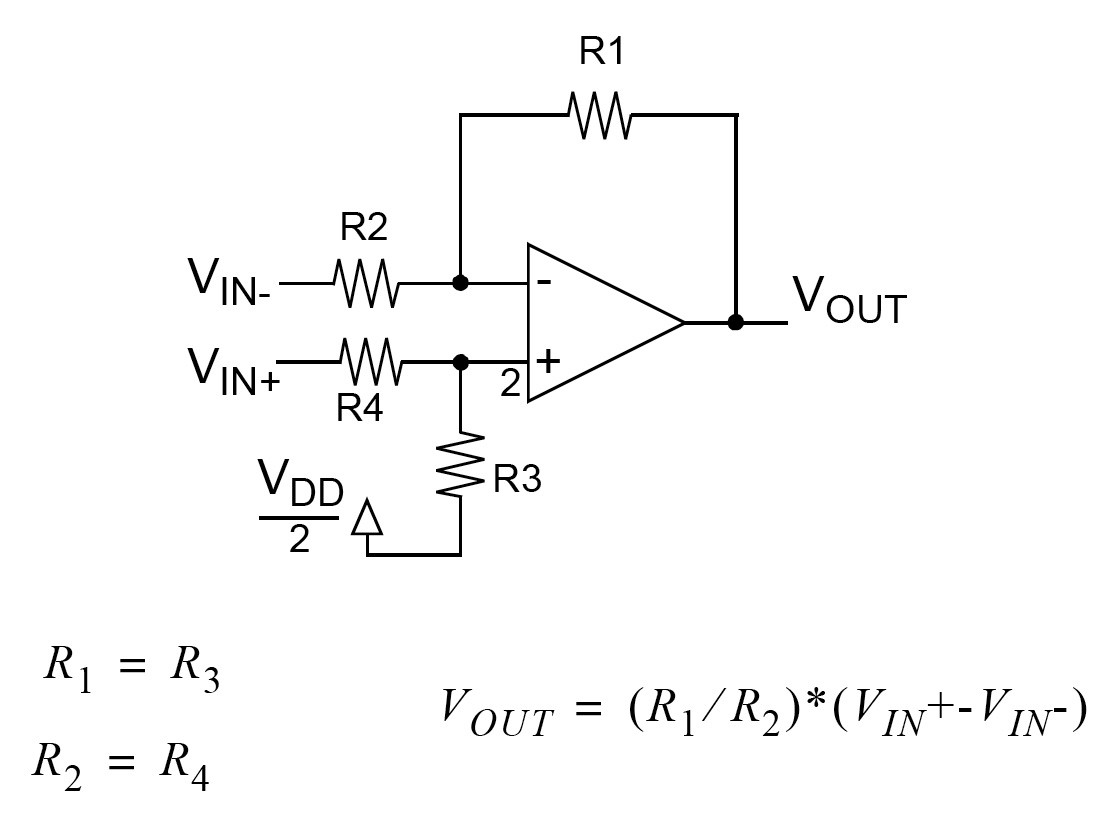
Obr. 3 Obvod diferenciálního zesilovače
Ultrazvukový přijímač se v obvodu chová jako laděný filtr s vysokou hodnotou Q. Rozdílový operační zesilovač zesiluje také filtrační účinek přijímače. Proto je první operační zesilovač a filtr zapojen ve společném režimu. Všechny následující operační zesilovače tak již nezesilují šum a nevyžadují použití dalších filtrů. Správná volba vhodného typu prvního operačního zesilovače v obvodu ultrazvukového přijímače tak dokáže eliminovat nutnost použití dalších zesilovačů, a především filtrů.
U této aplikace byl použit obvod MCP6022 od společnosti Microchip, mimo jiné proto, že šířka pásma pro jednotkový zisk (UGBW) je 10 MHz. Vyšší UGBW znamená i vyšší zisk na pracovní frekvenci, v našem případě 40 kHz. V případě uvedeného obvodu je zisk na 40 kHz v rozmezí 250–300 a je omezen pouze UGBW, nikoliv hodnotou odporů R1/R2.
Vstupní komparátor je obvod využívaný v mnoha komunikačních aplikacích. Detekce signálu probíhá komparací prahového napětí V_th se zesíleným vstupním signálem. Hodnota V_th je přitom na obr. 4 nastavena mírně podprůměrnou hodnotou zesíleného ultrazvukového signálu V_US.
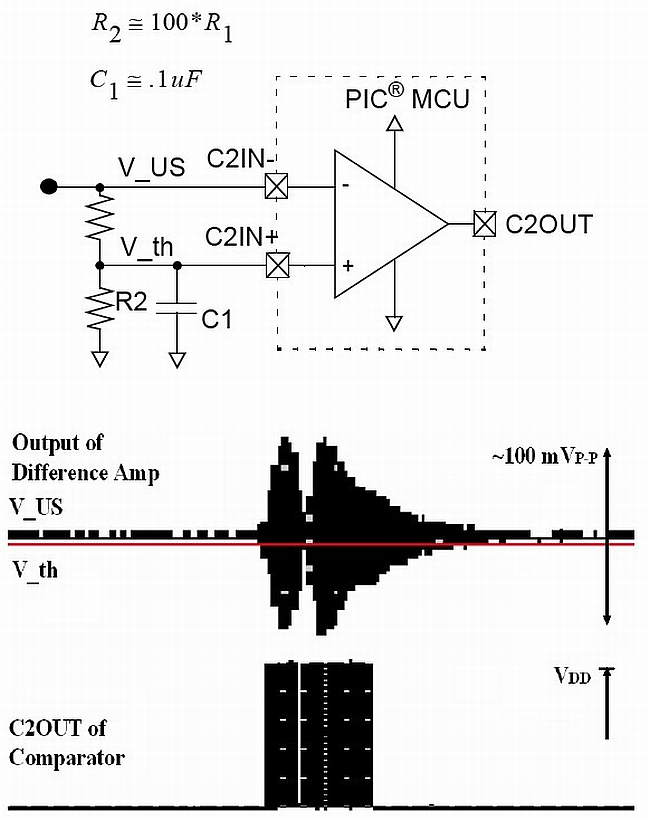
Obr. 4 Vstupní komparátor
V okamžiku, kdy je zachycen a zesílen ultrazvukový pulz, klesne hodnota napětí na vývodu C2IN– pod hodnotu C2IN+, což způsobí překlopení na výstupním vývodu komparátoru. Hodnota R2 by přitom měla být výrazně větší, než je hodnota R1, ale zároveň nesmí být tak velká, aby nezpůsobila překlopení komparátoru vlivem parazitního šumu na zesíleném signálu. V ideálním případě je hodnota R1 nastavena tak, aby se úroveň prahového napětí pohybovala těsně nad hodnotou šumu přijímaného ultrazvukového signálu. Čím blíže je přitom prahové napětí k přijímanému signálu, tím větší je maximální vzdálenost detekovatelná přijímačem.
Vývod C2OUT mikrokontroléru PIC lze s výhodou využít pro ladění této fáze ultrazvukového přijímače. Častým problémem je přitom nesprávné nastavení prahového napětí. Je-li jeho hodnota příliš nízká, bude použitelný dosah přijímače zbytečně omezován. Pokud je naopak příliš vysoká, bude komparátor překlápěn i vlivem špičkových hodnot šumu na vedení, což může zcela degradovat funkci detekce odraženého signálu.
Vstupní hradlo čítače/časovače Timer1 umožňuje povolení hodinového signálu pro 16bitový čítač Timer1. Jako zdroj pro vývod hradla Timer1 může být přitom interně v MCU nastaven i výstup z komparátoru, pin C2OUT. Běh čítače je zde povolen pouze tehdy, je-li na vývodu C2OUT nízká úroveň. V okamžiku detekce ultrazvukového signálu a změny hodnoty C2OUT se čítač zastaví. Hodnota, která je v tu chvíli uložená v registrech Timer1, představuje čas odrazu signálu v podobě počtů pulzů ultrazvukového signálu. V závislosti na rychlosti oscilátoru zařízení však tato hodnota může mít i konkrétní hodnotu času.
Po detekci odraženého ultrazvukového pulzu je hodnota z Timer1 načtena a použita k výpočtu odpovídajícího času návratu. Získaná hodnota přitom může být snadno převedena na vzdálenost prostým vydělením dvěma a vynásobením rychlostí zvuku. Dělení dvěma proto, že se jedná o měření kruhové cesty a lze ho snadno dosáhnout změnou jediného bitu.
Reálné rozlišení systému je ovlivněno vlnovou délkou nosné frekvence. Frekvence 40 kHz má přitom vlnovou délku zhruba 0,85 cm. Použití vyšší nosné frekvence zvyšuje rozlišení, ale zároveň také zužuje směrovost a snižuje dosah. Rozlišení může být v praxi ovlivněno také přesností oscilátoru použitého pro měření času odraženého pulzu či zpožděním signálu ve více aplikovaných filtrech. Po zhodnocení všech ovlivňujících faktorů lze u ultrazvukového systému, pracujícího na frekvenci 40 kHz, dosáhnout reálného rozlišení asi 1 cm. Hodnota přitom není závislá na dosahu a vychází pouze z detekce odraženého pulzu.
V případě maximálního dosahu existují především dva způsoby, jakými lze v této aplikaci zjistitelnou vzdálenost rozšířit: zvýšení vysílacího výkonu a zvýšení citlivosti přijímače. V této aplikaci je vysílač buzen přímo z I/O pinů MCU, které jsou schopny dodat výstupní proud maximálně 20 mA při 5 V. Použití budičů a tranzistorů MOSFET by zajistilo vyšší výstupní proud a napětí. Zisk přijímače na frekvenci 40 kHz určuje, jaký signál může být detekován komparátorem.
V tomto případě je použit pouze jediný operační zesilovač v rozdílovém zapojení. Vzhledem k tomu, že se jedná pouze o jednostupňový zesilovač, není již zapotřebí žádných dalších filtrů. Použití vícestupňového přijímače již bude muset být doplněno o filtr mezi jednotlivými stupni a komparátorem, aby se aktivně potlačil parazitní šum. Rovněž také vhodná konfigurace prahového napětí komparátoru zajistí správnou funkci celého obvodu.
Pokud je použit samostatný vysílač a přijímač, je samozřejmě nutné jejich vyrovnání ve stejném směru. Nesmíme však zapomínat na přímou vazbu mezi vysílačem a přijímačem, a také na přenos signálu do obvodu přijímače přes materiál DPS. Tuto vazbu lze snížit buď zvýšením vzdálenosti mezi vysílačem a přijímačem, nebo lze na DPS vytvořit výřez. V praxi jsou obvody ultrazvukového snímače obvykle fixovány pomocí gumy nebo silikonu, který zajistí omezení množství ultrazvukového signálu uniklého z/do okolního materiálu.
Závěr
Ultrazvukový měřič vzdálenosti může být snadno konstruován například s pomocí mikrokontroléru PIC16F690, operačního zesilovače MCP6022 a součástek Murata MA40S4R/S ve funkci ultrazvukových měničů. Dva I/O vývody mikrokontroléru PIC zajistí dostatek energie pro přímé generování 40kHz ultrazvukového signálu. Pro jeho vytvoření a následnou detekci odrazu mohou být s výhodou využity čítače Timer0 a Timer1. Zesílení přijatého signálu zajistí MCP6022 v obvodu přijímače a o detekci se postará komparátor, integrovaný přímo v PIC16F690.
