
 Vítejte, dnes je
neděle
26.
červenec
2026
Vítejte, dnes je
neděle
26.
červenec
2026

Digitálně řešené napájení. Co jsou mýty a kde je pravda?
Analogově řešená konverze napájení po desetiletí utvářela základní principy zdrojů a jejich elektroniky, takže nějaké digitální postupy budou pro spoustu vývojářů docela neznámým pojmem. Záleží, koho se zeptáte, ale můžete třeba zjistit, že se jedná o něco druhořadého, příp. též zbytečnou výstřednost. Skutečnost je však taková, že technologie nabízí nové prvky a také výhody pro návrhy, které je upotřebí. Číslicově řešené napájení může znamenat mnoho různých věcí a digitální technologie mohou stejně tak přinést i řadu výhod, budou-li používány s rozvahou. V článku se proto zaměříme na několik běžně rozšířených mylných představ s cílem lépe porozumět náročným úkolům, přínosům a také správnému nasazení digitálních technologií právě v oblasti konverze napájení.
Spínané zdroje máme výhradně analogové nebo digitální
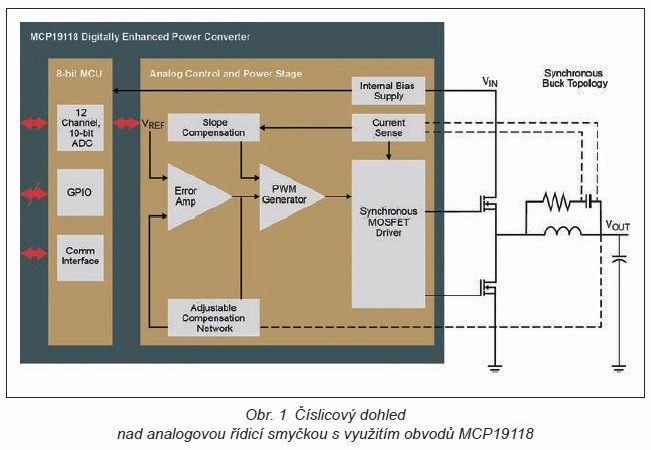
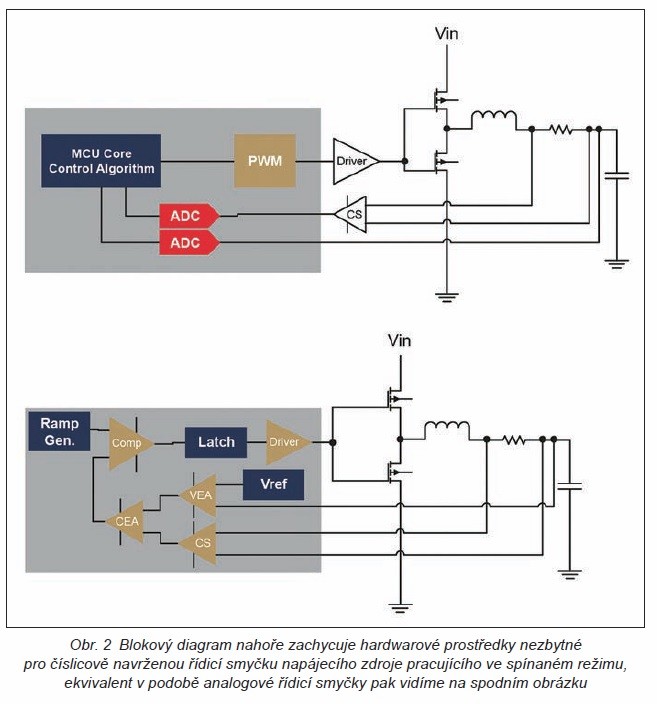
Konverze napájení řešená ve spínaném režimu znamená ve své podstatě systém se smíšenými signály. Průběhy s pulzně-šířkovou modulací (PWM) máme digitální a zpětnovazební signál zase analogový. Místo mezi těmito dvěma uzly pak bude vyhrazeno A/D převodu s velmi přesným časováním. K takové konverzi může dojít poté, co se řídicí část vystavěná na zesilovači rozhoduje o spínání nebo též ve spojitosti se zpětnovazebním signálem umožňujícím číslicovému algoritmu stejnou volbu. Analogové řídicí čipy více než kdy jindy zahrnují digitální rozhraní sloužící k vnějšímu řízení a číslicové mikrokontroléry zase přicházejí s analogovými prvky umožňujícími řízení napájecích zdrojů – viz obr. 1. K napájecímu zdroji bylo vždy možné přidat mikrokontrolér, nicméně v současné době může mít takový mikrokontrolér na chování systému větší vliv než kdykoli předtím. Jinými slovy, v rámci kontroléru pracujícího s digitálními signály bude možné řešit celou řídicí smyčku. Ať tak, či onak, návrh zdroje napájení může být ještě flexibilnější, lépe nastavitelný a dokáže také chytřeji reagovat na okolní podmínky nebo vnější vstupy. Takové funkce dokážeme přidat bez ohledu na to, zda máme samotnou řídicí smyčku implementovánu v číslicové, či analogové oblasti. Spínané zdroje dnes mohou dostat tolik logických obvodů, kolik jen bude aplikace potřebovat.
Číslicové funkce si žádají digitální řídicí smyčky
Metoda řízení bude v systému konverze napájení tvořit pouze jeden z předpokladů. Mikrokontrolér dokážeme přidat do libovolného analogového systému, a umožnit mu tak dodatečnou kontrolu nebo ovládání, napájecí zdroje nevyjímaje. Schopnost mikrokontroléru působit na analogovou řídicí smyčku byla v minulosti očividně omezená, protože speciální analogové řídicí prvky na tom se svými předpoklady pro dynamické přizpůsobení nebyly vůbec dobře. Novější analogové řídicí součástky však mnohem častěji pamatují na digitální rozhraní a s tím související lepší možnosti konfigurace či nastavení než v případě předešlé generace obvodů. Stejně tak zde máme integrované struktury měničů s mikrokontroléry přímo na čipu, vytvářející předpoklady pro novou dimenzi v otázce dynamické konfigurace. Díky pečlivé volbě obvodů pro číslicová komunikační rozhraní, režimy spánku, posun kmitočtu, synchronizaci, měkký start, inteligentní ochranu proti selhání nebo též změny spojené s napětím či proudem na výstupu lze vše chytře zapracovat do systému konverze napájení a přidat k návrhům buď s analogovou, nebo i digitálně řešenou řídicí smyčkou.
Digitální napájení není tak odolné jako analogové
Otázka robustnosti systému je složitá a jak pro analogové, tak též digitální zdroje napájení zde máme spoustu otázek, na které bychom ve světle rostoucí odolnosti návrhu neměli zapomínat. Je možné, že v závislosti na konkrétním řešení budou mít analogové napájecí zdroje rychlejší hardwarovou reakci na chybu, nabídnou svižné podpěťové i přepěťové komparátory a také nefalšované proudové omezení v každém cyklu. Takové prvky však mohou být implementovány rovněž v číslicově řízených zdrojích, třeba se speciálními analogovými strukturami, které nacházíme ve vyspělejších čipech pro digitální řízení. Číslicové kontroléry mohou třeba zahrnovat analogové komparátory sloužící k omezení proudu. Digitálně navržené zdroje napájení (a to i za předpokladu analogových řídicích smyček) budou mít kromě toho několik zřetelných výhod, které s kompletním a čistě analogovým přístupem nelze ve skutečnosti zopakovat. Díky programu – kódu si můžeme přizpůsobit reakce na chyby nebo „brown out“, včetně vlastního měkkého startu, stejně tak i vypínání, udržovacího nabíjení, přerušení nebo opětovného spouštění, které mohou být s analogovými obvody jen obtížně, pakliže vůbec řešitelné. Digitálně řešené řídicí smyčky nebo zpětnovazební sítě integrované přímo na čipu snižují závislost na vnějších pasivních součástkách, které v průběhu času nezřídka degradují a jejichž parametry ujíždějí. A nejen to, díky číslicovému rozhraní dostáváme diagnostické informace, nebo i další hlášení, která nám poslouží při rozpoznávání možných problémů a také za účelem předcházení tvrdých výpadků systému. Pokud zmíněné funkce zapracujeme, můžeme ve srovnání s prostým analogovým přístupem vytvořit mnohem robustnější návrh. Veškeré napájecí zdroje potřebujeme bez ohledu na konkrétní provedení pečlivě otestovat, a vytvořit jim tak předpoklady pro dlouhou životnost. V případě digitálních zdrojů napájení však nepozorujeme žádná zásadní omezení v otázce spolehlivosti, která by při srovnání s jejich analogovými protějšky měla vést ke špatným výsledkům.
Digitální napájení je dražší
Vývojáři sice mohou nabýt dojmu, že číslicově řízené napájecí zdroje budou oproti svým analogovým verzím stát více peněz, ale pravda to vždy není. Digitální zdroje mohou být i levnější, protože je lze vystavět za přispění méně přesných, a tudíž i lacinějších součástek. Mohou si také vystačit s menším počtem prvků, a snižovat přitom jak cenu, tak též výsledné rozměry. A další úspory lze očekávat i ve světle celkových nákladů na vlastnictví. V aplikacích s proměnlivou zátěží mohou vývojáři sáhnout po nelineárních a adaptivních algoritmech, s nimiž pro libovolný soubor pracovních podmínek dosáhnou nejvyšší možné účinnosti. Další příčina levnějšího provozu digitálních zdrojů se pak odvíjí od schopnosti počítat v průběhu času se stárnutím součástek a upozornit uživatele na potřebu preventivního zásahu, kdy předcházíme katastrofickým scénářům (bývá rovněž spojeno s nákladnými a neočekávanými odstávkami).
Digitální napájení bude účinnější
Číslicově řízené zdroje napájení mohou navzdory změnám zátěže v širokém rozsahu nabídnout lepší účinnost. V reakci na odlišné podmínky a s využitím postupů, jako je např. Phase Shedding, přitom dokáží pracovat s adaptivními algoritmy, a dokonce i pozměnit topologii systému. Digitálně ovládané zdroje mohou dále stavět na nelineárních a prediktivních postupech zlepšujících dynamickou odezvu na přechodové jevy. Rovněž i analogové napájecí zdroje mohou být za daných podmínek stejně tak účinné jako jejich číslicové verze, problém u analogu však nastává v okamžiku, kdy potřebujeme maximalizovat účinnost, zatímco se např. se zatěžovacím proudem dostáváme mimo optimální pracovní bod. Výkon nezbytný k činnosti samotného číslicového kontroléru však na druhou stranu může překročit míru požadovanou analogovými obvody. Digitální prvky budou obvykle lepší volbou pro aplikace s vyššími výkony, kde jejich vlastní spotřebu kompenzujeme dalšími energetickými úsporami pramenícími z komplexnějších řídicích algoritmů, jež číslicová technologie nabídne.
Zpoždění digitálních kontrolérů negativně ovlivní odezvu na přechodové jevy
V rámci číslicově kompenzovaného systému nám ve spojitosti se zpožděním působí starosti dvě stěžejní otázky týkající se vlivu vzorkování a doby výpočtu.
U každé konverze napájení bude dělicí kmitočet (odezva na přechodový děj) a fázová rezerva (stabilita) pokaždé znamenat kompromis. Číslicové systémy máme v jádru podobné, nicméně systémy s digitálním řízením budou vzorkovat. Periodické vzorkování (jednou za cyklus) vnáší do přenosové funkce fázový posun, což neumíme jednoduše kompenzovat. Digitální systém potřebuje k dosažení stejné fázové bezpečnosti, uvažujeme-li shodnou metodu kompenzace, nižší dělicí frekvenci. A nejen to, procesor musí v rámci jednoho spínacího cyklu zajistit čtení z A/D převodníku a také výpočty rozdílu, jinak z titulu prodlevy při operacích dostaneme další periodu zpoždění.
Se zmíněnými negativy se však dokážeme vypořádat díky moderním metodám nelineárního řízení a také dopředným postupům – algoritmům, které bychom v rámci analogového řídicího systému řešili jen s obtížemi, pakliže vůbec. Stinnou stránku zde budou tvořit požadavky na zpracování znamenající kompromis mezi rychlostí takové operace, spínacím kmitočtem, složitostí algoritmu a také odezvou na přechodový děj. S tím vším potřebujeme počítat, ale ve spojení s digitálním řízením to nutně neznamená zhoršení odezvy systému.
Nulový proud zátěží znamená problém
Spínané zdroje zpravidla pracují v jednom ze dvou režimů s nespojitým a také souvislým vedením. V případě prvního módu proud indukčností na konci každého cyklu PWM klesá k nule. V režimu trvalého vedení pak pozorujeme nepřetržitý tok proudu indukčností. Výhoda trvalého vedení spočívá v proudu indukčností, který s každým pulzem PWM nemusí stoupat až od nuly, takže pro každý cyklus PWM obdržíme větší amplitudu. Nevýhoda pak odkazuje na zesilovač odchylky, resp. filtr smyčky, kde pro udržení stability potřebujeme dostat správnou kombinaci nul a pólů. Pokud se však proud v režimu s trvalým vedením dostává k nule, může to bohužel zapříčinit nestabilitu řídicí smyčky.
Starší návrhy v tomto světle často definovaly buď minimální proud, případně takový průtok samy zaručovaly umístěním zatěžovacího rezistoru na výstup (FCC, Forced Continuous Conduction). Dnes již naštěstí máme vhodné kontroléry, které napájecím zdrojům pomohou jak s trvalým vedením, tak též s nespojitými režimy (PWM a PFM), a to společně s monitorovacími obvody stanovujícími kdy zaměnit jeden režim provozu za jiný. Jestliže jsme tedy byli v minulosti limitováni návrhem kontrolérů pro napájecí zdroje, novější součástky řeší spínání ve spojitosti s režimy již automaticky a nějaká omezení budou spíše jen poznámkou v historickém okénku.
Digitální zdroje bude těžké navrhnout
Návrh číslicově řízeného zdroje napájení nemusí být nutně obtížnější než v případě analogových struktur, bude pouze jiný. Svou podstatou se totiž v obou případech velmi podobají. Řídicí smyčka nebo též návrh kompenzačního obvodu se u digitálního kontroléru, spíše než v analogové rovině, řeší firmwarovou cestou. Poloha pólů a nul systému poslouží stejně jako v případě analogového návrhu k definici charakteristik kompenzačního obvodu. V případě softwarových nástrojů číslicově řešené kompenzace však bude často využita k přizpůsobení optimální odezvy pro řídicí smyčku. Velmi dobře optimalizované softwarové knihovny, zahrnující např. běžné algoritmy kompenzačního obvodu 2P2Z (typ II) a 3P3Z (typ III) pro využití s rodinou digitálních signálových kontrolérů dsPIC od společnosti Microchip, jsou na stránkách výrobce zdarma k dispozici. Pro tyto funkce vývojáři nepotřebují psát software. Zmíněné algoritmy máme kromě toho odladěny pro konkrétní účely na základě koeficientů odvozených vývojovými nástroji.
Návrh digitálního zdroje bude snadnější než u analogu (je to jen software)
Skutečnost, že číslicově řešené zdroje napájení využívají pro řídicí algoritmy softwaru, jejich návrh zřejmě nezjednoduší. Vývojáři potřebují stále plně rozumět řídicím systémům a vystihnout kmitočtovou odezvu takového řešení, to aby dokázali náležitě konfigurovat použité kompenzační struktury založené na softwaru. Doladění chodu zdroje a jeho úpravy však na druhé straně vyřešíme snadněji softwarovou cestou. Hardwarové změny bývají složitější.
Stačí jen DSP. Výkonem si vše vynahradíme
Přestože bude výkon číslicových systémů spousta zasvěcených vnímat jako prostředek řešící veškeré problémy, pro každou aplikaci to platit nemůže. V případě kapesního přehrávače souborů MP3 napájeného z interního článku Li-Ion nám třeba nedává smysl vyhradit při zpracování veškerý výkon pouze na zvýšení napájecího napětí. Na druhou stranu takové platinové zdroje v serverech vyžadují schopnosti digitálně řešených měničů, s nimiž by na výstupu účinně zajistily potřebný výkon a zároveň rychle reagovaly na změny zátěže. Vysílače provozované v mobilních sítích budou mít např. během přenosu vysoké proudové nároky, zatímco v nečinnosti spotřebují výrazně méně energie. Kontrolér u vysílací části rozpozná aktivaci, a může proto „vzburcovat“ měnič, a koordinovat přitom nárůst střední velikosti proudu tak, že po spuštění relace již bude potřebný výkon k dispozici. Během reakce filtru smyčky se tedy po takové události vyhneme propadu výkonu. Půjde přitom o jednu z významných vlastností číslicově řízených zdrojů, která ospravedlní i rostoucí složitost konkrétního návrhu.
Systém s docela stabilními požadavky na výkon však může stavět na analogových principech provázaných s mnohem jednodušším, a tudíž i méně komplikovaným řešením a také nižší cenou. Přece jenom ale bude poměrně složité zajistit nízkou cenu a také jednoduchost regulátorů řešených na způsob ASIC.

Softwarově definované napájení získá převahu
Před několika lety se očekávalo, že softwarově definované rádio (SDR) ovládne oblast přijímačů a stane se běžným řešením. SDR sice má určité výhody, ale také jeden hlavní problém: k příjmu bude vyžadovat procesor s 10x až 100x MIPS. Dokonce i systémy využívající k převodu rádiových kmitočtů (RF) na nižší mezifrekvenci (IF) analogového směšovače stále potřebují 10 až 100 MIPS a demodulace zde může být vším, co takový procesor zvládne. Z pohledu nákladů to opravdu není šťastné řešení. Když tedy někdo tvrdí, že softwarově definované napájení (Software Defined Power, SDP) vytlačí tradiční zdroje, nemusíme to brát příliš vážně. Není totiž nic jednoduššího ani levnějšího než lineární stabilizátor. I v případě, že snad za stejnou cenu dostaneme procesor s potřebnými MIPS, stále se neobejdeme bez lineárního 5V zdroje dodávajícího procesoru při startu potřebné napájení. A tak ačkoli SDP mají ve světě napájecích zdrojů jasně vymezené pole působnosti a nic jiného jejich práci nezastane, není to, a taky nikdy nebude, univerzální řešení konverze napájení, které by vyhovělo naprosto všem.
Závěr
Nechceme si hrát se slovíčky, ale uvážíme‑li nestabilní tržní prostředí, a to i v případě současné nabídky zdrojů, bude často obtížné odlišit marketingové „kudrlinky“ od podstatných sdělení. Zastánci změn opěvují přednosti nových technologií, ale mnohdy již nezmiňují odvrácenou stranu mince. Konzervativní křídlo zase vidí jen problémy, a zastává přitom názor „pokud to funguje, není třeba s tím cokoli dělat“. My se samozřejmě nepohybujeme ani v jednom extrému. Obvykle se totiž při své práci a se svými návrhy potřebujeme vydat zlatou střední cestou, použít něco nového i staršího a najít pro své aktuální potřeby tu správnou kombinaci. A to je přesně důvod, proč společnost Microchip nabízí celou řadu řešení pro napájecí zdroje – od klasických analogových až po číslicově řízené. Víme, že svět není pouze černobílý a prostor je docela široký. Ať již tedy budou vaše požadavky na napájení jakékoli, vězte, že máte z čeho vybírat.
