
 Vítejte, dnes je
neděle
26.
červenec
2026
Vítejte, dnes je
neděle
26.
červenec
2026

Dynamickou odezvu smyčky zdroje lze vylepšit
DC/DC měniče převádí kolísavé vstupní napětí na zpravidla pevně dané výstupní napětí a využívají přitom zpětnovazebního systému řízení. Abychom předešli kmitání, nebo v nejhorším případě situacím, ve kterých zůstává výstupní napětí bez regulace, měl by být zpětnovazební řídicí systém tak stabilní, jak jen to bude možné.
Podobně by měl stejný systém umět reagovat maximální možnou rychlostí, což je také předpokladem pro správné odezvy, na dynamické jevy, třeba prudkou změnu vstupního napětí či různé zatěžovací poměry na výstupu, takže lze u stabilizovaného výstupního napětí minimalizovat odchylky. Abychom vyjádřili chování řídicí smyčky, pomůžeme si typickým Bodeho diagramem, který zde vyjadřuje fázový posun a zesílení v závislosti na kmitočtu. Taková řídicí smyčka pak může být navržena s využitím analogových nebo číslicových technologií.
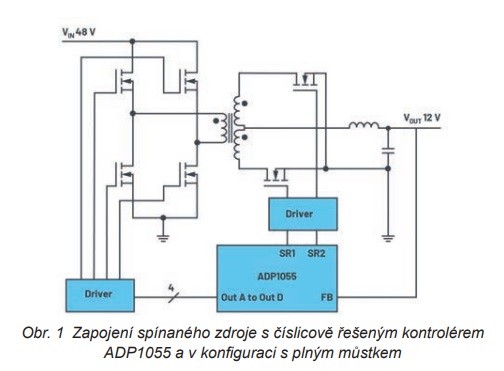
Některé digitálně řešené zdroje napájení nabízí optimalizaci řídicí smyčky umožňující dosahovat velmi rychlé odezvy na dynamické děje. Příklad zapojení s integrovaným kontrolérem ADP1055 [1] nabízejícím optimalizaci prostřednictvím číslicově navržené řídicí smyčky ilustruje obr. 1. Digitálně řešené kontroléry nabídnou vývojářům během řízení řadu možností – někdy dokonce i dynamicky, tedy v průběhu činnosti. Na obr. 2 vidíme nejrůznější funkce obvodu ADP1055, které můžeme mít díky příslušnému softwaru pod kontrolou.
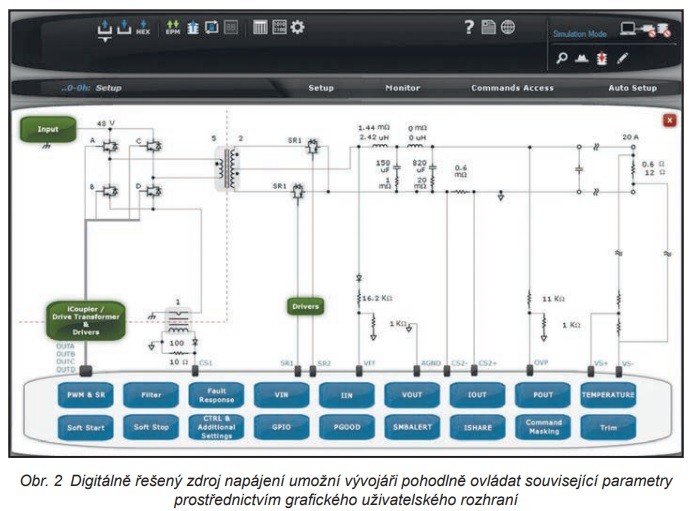
Obzvláště zajímavá možnost nastavení, pokud jde o smyčku řízení, je nabízena prostřednictvím funkce „Nonlinear Gain/ Response“ dostupné přes tlačítko „Filter“. Umožňuje totiž dynamické přizpůsobení řídicí smyčky, například v okamžitéreakci na změnu zatížení. Pokud je napájecí zdroj vystaven velkým změnám na zátěži, jeho výstupní napětí se zpravidla pohybuje nad nebo také pod svou ideální a stabilizovanou hodnotou. U čistě analogové řídicí smyčky budou její součástky a také výkonový stupeň napájecího zdroje vybírány tak, aby mohly v nejčastěji předpokládaných situacích takové výkyvy minimalizovat. Výhoda číslicově ovládané smyčky řízení, jako je tomu i v případě obvodu ADP1055, však spočívá v tom, že odezvu smyčky lze přizpůsobit v průběhu činnosti a kompenzovat přitom široce se měnící podmínky.
Rozhraní pro ovládání takové funkce zachycuje obr. 3. Typické chování výstupního napětí po změně z velkého na malé zatížení je vyznačeno modře. Jak můžeme vidět na odezvě, u výstupu regulátoru obvykle dochází k překmitu. Ten pak dokážeme minimalizovat prostým zvýšením zesílení řídicí smyčky, pokud výstupní napětí překračuje určité prahové úrovně.
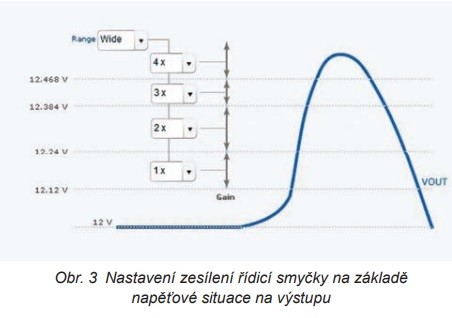
V příkladu na obr. 3 má výstupní napětí nastavenou jmenovitou hladinu 12 V. V závislosti na výstupním napětí pak lze zesílení u přizpůsobitelné řídicí smyčky definovat pro celou řadu hodnot. Pokud tedy např. napětí kvůli zvýšenému zisku zesilovače odchylky vzroste nad 12,12 V, bude možné řídicí smyčku nastavit v odpovídajícím rozevíracím seznamu. Kromě toho zde ještě máme tři další napěťové prahy, pro které lze nezávisle stanovit zesílení. Všimněte si, že taková nastavení zisku budou zcela nezávislá na pólech či nulách, které definujeme při návrhu regulační smyčky.
Přizpůsobitelné nastavení zesílení v závislosti na napětí umožňuje najít takovou definici pro řídicí smyčku, která nabídne zrychlenou odezvu na překmity napětí. Bude proto možné optimalizovat kvalitu řízení, pokud jde o výstupní napětí a zpětnou vazbu. Za zmínku rovněž stojí, že charakteristiky optimalizované smyčky řízení nejsou v případě běžné činnosti ovlivněny. Dynamické přizpůsobení řídicí smyčky za konkrétních okolností, třeba po změně zatížení, je možné realizovat díky číslicově řešeným kontrolérům, jako je obvod ADP1055. Pro klasické analogové smyčky to však bude obtížné.
odkazy
[1] Obvody ADP1055, https://www.analog.com/en/products/adp1055.html#product-overview
