
 Vítejte, dnes je
sobota 11.
červenec
2026
Vítejte, dnes je
sobota 11.
červenec
2026

Nízký šum nebo malá spotřeba? S novými akcelerometry jde obojí
Práce vývojáře bude celá o kompromisech. Ale nenechte se zmást, skvělých výsledků můžeme dosáhnout i tam, kde bychom je na první pohled vůbec nečekali. Názorně si to ukážeme na příkladu nových akcelerometrů MEMS, které porovnáme s jedním z jejich předchůdců. Světu svou novinku společnost Analog Devices představila v říjnu [1], kdy jsme o ní rovněž informovali na webových stránkách DPS Elektronika od A do Z [2].
Nejen do dronů
Nové 3osé akcelerometry MEMS umožní měření vibrací s vysokým rozlišením a především pak s velmi nízkou hladinou šumu. Budou-li např. součástí bezdrátové sítě senzorů, mohou jednoduše a především včas varovat před narušenou statikou budov. Díky své malé spotřebě navíc prodlouží interval výměny baterií v takových čidlech.
Novinky dostáváme dvě, ADXL354 s analogovým výstupem [3] a ADXL355 s výstupem číslicovým [4] – viz obr. 1. Stabilita obou akcelerometrů zajišťuje skvělou opakovatelnost výsledků měření se změnami teploty a také v čase, což oceníme třeba u navigace bezpilotních systémů, dronů apod., které staví na měřicích jednotkách IMU (Inertial Measurement Unit) a sklonoměrech. Díky takové opakovatelnosti při měření náklonu za různých provozních podmínek mohou součástky vykázat minimální chybu měření i v náročném prostředí a ještě k tomu bez rozsáhlé kalibrace.
Nulový offset (0 g) se s teplotou a také pro všechny osy změní maximálně o 0,15 mg/°C. Hermeticky uzavřené pouzdro pak už jen zajistí, že koncový produkt vyhoví daným specifikacím ještě dlouho poté, co opustí výrobní linku. Se svým výstupním rozsahem FSR ±2 g až ±8 g, volitelnou číslicovou filtrací od 1 Hz do 1 kHz a nízkou hustotou šumu budou nové akcelerometry při uvážení proudového odběru pod 200 μA směle konkurovat i dražším strukturám.
Co prozradí čísla
Tak tedy „low noise“ nebo „low power“? Abychom se dobrali správné odpovědi na otázku z našeho titulku, necháme proti sobě stanout nové akcelerometry ADXL355 s digitálním výstupem a stejně tak jednoho z jejich předchůdců, obvod ADXL362 [5]. Učiníme tak podobně jako aplikační inženýr Mark Looney z Analog Devices v [6]. V prvním případě půjde právě o ten šum, zatímco označení „Micropower“ v názvu druhé struktury ADXL362 dává správně tušit energeticky šetrnější protipól – viz tabulka 1.
Celkem tři řádky v tabulce 1 zachycují volitelné provozní režimy akcelerometru MEMS ADXL362, zatímco zbývající řádek bude výsledky porovnávat s naší novinkou v podobě ADXL355. Právě ta nabídne ve srovnání s ADXL362 v režimu nejnižší spotřeby přibližně 27× nižší úroveň šumu, ovšem za cenu obrovského nárůstu ztrátového výkonu. A nyní necháme obvod ADXL362 předvést jeho „ultra“ nízkošumové vlastnosti. Novinka ADXL355 bude v tomto případě už jen 9× lepší, zatímco její předchůdce zase vykáže 13× menší spotřebu.
Bezvýchodná situace? Ne tak docela, pokud připustíme, že se toho může za čísly skrývat mnohem více. A to zejména v aplikacích, které se bez skutečně nepřetržitého pozorování a měření mohou obejít. To pak bude vzájemný vztah mezi průměrnou výkonovou ztrátou a vykazovaným šumem ještě zajímavější. Ale nepředbíhejme a pojďme se na to s Markem podívat postupně.
Chytrá čidla v praxi
Návrh takového „smart“ senzoru se může, a mnohdy také bude, odvíjet od blokového diagramu na obr. 2. Detailnější rozbor najdou zájemci v [6], kde např. zjistí tři hlavní funkce bloku řízení napájení (Power Management). Jedná se o správu požadavků na řízení posloupnosti napájecího napětí pro všechny obvody v signálovém řetězci, konverzi ze zdroje napájení na napětí, která budou podporovat optimální činnost celého systému, a konečně v aplikacích s pravidelnými měřicími intervaly tento blok asistuje při spouštění každé z událostí. My se ale v našem článku zastavíme především u filtru.
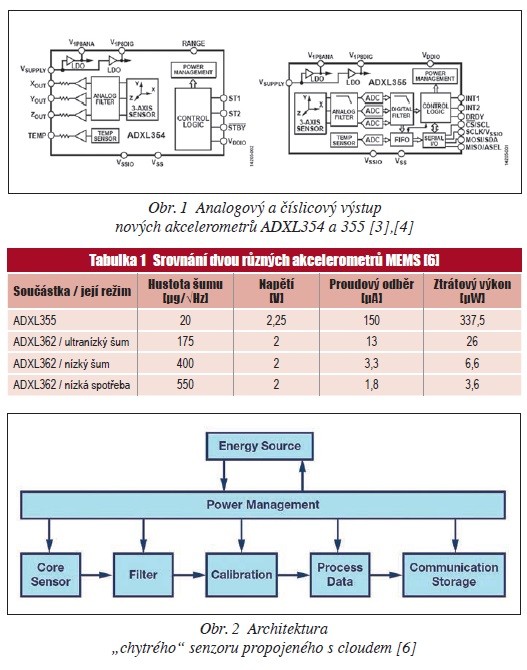
Smysl tohoto stupně spočívá v potlačení kmitočtového pásma, které sice senzor podporovat může, ale pro naši aplikaci nebude podstatné. Pokud tedy sledujeme vibrace, může se jednat o pásmovou propust odlišující nahodilé chvění právě od specifických kmitů spojovaných třeba se zhoršujícím se stavem stroje. V případě detekce náklonu můžeme zase zvážit jednoduchou dolní propust, resp. průměrování. A právě na časové ose zde hledáme významný kompromis mezi dobou ustálení a zbytkovým šumem na výstupu filtru, potažmo pak i spotřebou.
Příklad takové křivky RAV (Root Allan Variance) pro nejistotu měření (šum) zachycuje v ose x obvodu ADXL355 přímo z jeho dokumentace [7] i náš obr. 3. V dalším textu se k ní ještě vrátíme.
Nejen měřit, ale i odpočívat
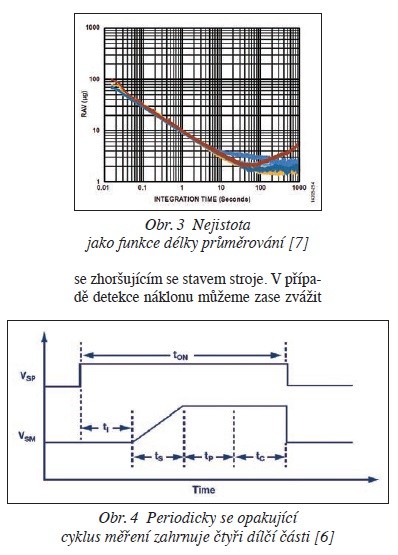
Pokud si to můžeme dovolit, energií výrazně šetříme právě periodickým spouštěním měření. Na obr. 4 vidíme jednu takovou aktivní fázi dále dělenou na čtyři dílčí úseky. Jedná se o dobu potřebnou k:
- inicializaci tI,
- ustálení tS,
- zpracování tP a
- komunikaci tC.
Nás ale bude především zajímat vliv doby ustálení, tzn. období mezi prvním vzorkem dat a okamžikem, kdy se výstup filtru ustálí na úrovni s vyhovující přesností. A opět se bude jednat o šum a jeho vliv na celkové ztráty.
Obecně vzato snižování velikosti šumu spojované s průměrováním bude úměrné druhé odmocnině času, zatímco rostoucí spotřeba je takové době úměrná přímo. Desetinásobné snížení velikosti šumu tedy znamená stonásobně vyšší spotřebu při ustalování filtru! A přesně takový nepoměr pak může rychle upřednostnit i čidla s menšími požadavky na filtrování, tzn. ta s nejnižším šumem. Pojďme si to názorně ukázat na jednoduchém příkladu [8].
Když více znamená méně
Z charakteristiky RAV na obr. 3 vyplývá, že doba průměrování 0,01 s znamená pro obvody ADXL355 nejistotu sníženou na 100 μg. Nyní se vrátíme k 9× lepší úrovni šumu obvodu ADXL355 oproti svému předchůdci, akcelerometru ADXL362 – viz tabulka 1 výše. Abychom však dosáhli srovnatelné úrovně nejistoty i s „nízkopříkonovým“ čidlem, budeme muset průměrovat 81× déle (druhá mocnina) než v případě nových ADXL355.
Jednoduchým výpočtem energií [8] nyní dostáváme pro někoho možná až překvapivý výsledek: kratší průměrování energeticky mnohem náročnějšího obvodu ADXL355 (EADXL355) za srovnatelných podmínek ušetří oproti jeho nízkopříkonové verzi (ELP) 6× více energie, konkrétně 3,38 μJ oproti 21,1 μJ. Není tedy „low power“ jako „low power“. Zapíšeme pak:
EADXL355 = tS355 × VMIN355 × I355
EADXL355 = 0,01 s × 2,25 V × 0,00015 A =
= 3,38 μJ
ELP = tLP × VLP × ILP
ELP = 81 × tS355 × VLP × ILP
ELP = 81 × 0,01 s × 2 V × 0,000013 A =
= 21,1 μJ
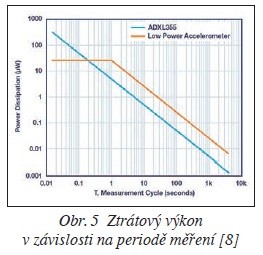
Výsledky si nyní můžeme vztáhnout k periodě měření a vynést graficky – viz obr. 5. Zlom pro nízkopříkonový akcelerometr zde nejenže nastává při 0,81 s, ale pro měření s periodou větší než cca 0,13 s budeme šetřit energii právě s akcelerometry ADXL355. To, co na první pohled vypadalo jako velká spotřeba, bude ve výsledku odebírat ještě méně.
Závěr
Nové akcelerometry MEMS ADXL354 a 355 od Analog Devices vynikají nízkým šumem, driftem a rovněž s nimi omezíme ztrátové výkony. Pracují ve třech osách a stejně tak se na ně musíme dívat ze správného úhlu i my. Jinak docela nízkopříkonové součástky s „líbivějšími“ proudovými odběry, například obvody ADXL362, totiž pro zajištění stejného šumového pozadí spotřebují energie mnohem více. Další informace k mikroelektromechanickým prvkům tohoto výrobce najdou zájemci v [9].
ODKAZY
[1] Analog Devices’ MEMS Accelerometers Enable Early Detection of Structural Defects, tisková zpráva, říjen 2016, http://www.analog.com/en/about-adi/news-room/press-releases/2016/10-3-2016-analog-devices-mems-accelerometers-enable-early-detection-structural-defects.html
[2] Na včasnou detekci konstrukčních vad s novými akcelerometry MEMS, DPS Elektronika od A do Z, http://www.dps-az.cz/mereni/novinky/id:30612/na-vcasnou-detekci-konstrukcnich-vad-s-novymi-akcelerometry-mems
[3] ADXL354, http://www.analog.com/ADXL354
[4] ADXL355, http://www.analog.com/ADXL355
[5] ADXL362, http://www.analog.com/ADXL362
[6] The Power of Low Noise in IoT Smart Sensors, autor Mark Looney, Analog Devices, 2016, http://www.analog.com/media/en/technical-documentation/technical-articles/The-Power-of-Low-Noise-in-IoT-Smart-Sensors.pdf
[7] Dokumentace k obvodům ADXL354 a 355, http://www.analog.com/media/en/technical-documentation/datasheets/ADXL354_355.pdf
[8] Low Noise or Low Power? Yes!, autor Mark Looney, Analog Devices, 2016, http://www.analog.com/media/en/technical-documentation/technicalarticles/Low-Noise-or-Low-Power-Yes.pdf
