
 Vítejte, dnes je
neděle
26.
červenec
2026
Vítejte, dnes je
neděle
26.
červenec
2026

Řízení motorů a výběr vhodných budičů
Elektrické motory, které v celé řadě aplikací pohání ventilátory, čerpadla a další typy strojů, představují v průmyslovém sektoru naprosto základní součásti. Tradiční AC motory, které zde máme již celé století, jsou nejjednodušším druhem indukčních motorů. Z pohledu spotřeby se na nich ale může ztrácet spousta energie. DC motory pak budou skupinou rotačních elektrických strojů, které se uplatní v nejrůznějších situacích. Rychlost můžeme u DC motorů ovládat díky změně napětí, přesně jak to zapojení vyžaduje. Lze tím výrazně šetřit energií, protože motor pracuje pouze tak, jak je to zapotřebí.
Elektrické motory a jejich vlastnosti
Elektromotor je „reverzibilním“ strojem schopným přeměnit elektrickou energii na mechanickou. Výrazem reverzibilní přitom naznačujeme, že to může jít i naopak. V takovém případě pak hovoříme o generátoru. Z hlediska pojmů, a často rovněž i prakticky, se v obou případech jedná o stejnou věc. Motor zde pokaždé tvoří pevná část (stator) a pohyblivá část (rotor). Jednotlivé typy motorů pak od sebe odlišujeme na základě toho, jakým způsobem jsou generována magnetická pole:
- stejnosměrné motory (DC): statické pole, generováno magnety nebo vinutími ve statoru; jsou k dispozici pro široký rozsah napětí, nejčastěji 12 a 24 V
- střídavé motory (AC): dynamické pole, generováno vzájemným působením mezi poli generovanými proudy a rotorem, otáčení rotoru je synchronizováno s kmitočtem napájecího proudu (synchronní AC motor)
- bezkartáčové motory: statické pole, generováno rotujícími magnety umístěnými pevně na rotoru
U DC motorů máme buzení magnetického pole řešené prostřednictvím statoru. V případě motorů s malými výkony mohou být magnety permanentní (např. ferity), zatímco u strojů se středními a vyššími výkony přichází na řadu speciální vinutí (wound field). Vazbu s rotorem pak zajišťují komutátor s kartáči, které však podléhají opotřebení. Pokud jde o robustnost a spolehlivost, systém dosahuje skvělých vlastností. Otáčky motoru bývají řízené změnou DC napětí přiváděného do vinutí kotvy. V závislosti na konkrétní aplikaci se využívá řešení s plným můstkem, polovičním můstkem či pulzně-šířkovou modulací PWM.
Se stejnosměrnými motory se rovněž často setkáváme v servo aplikacích, kde hrají klíčovou roli rychlost a přesnost. Abychom z tohoto pohledu vyhověli požadavkům návrhu, bude rozhodující řízení v uzavřené smyčce založené na mikroprocesoru, společně s informací o poloze rotoru. Zmíněnou informaci zde zajistí speciální rozhraní od společnosti Maxim [1] s obvody MAX9921 [2] stavějící na Hallově jevu. Výstupní napětí se bude měnit v závislosti na magnetickém poli. Čidlo se pak skládá z citlivého prvku provázaného s magnetem ve vzduchotěsné schránce, takže je možné detekovat změny magnetického toku během přibližování a také vzdalování tělesa z feromagnetického materiálu (kovový výstupek).
Součástka může perfektně pracovat od nulového kmitočtu až do několika kilohertzů. Prvky využívající Hallova jevu se používají jako senzory přiblížení, polohy, rychlosti a také při snímání proudu. Na rozdíl od mechanického spínače se jedná o řešení s vysokou životností, protože zde nemáme žádné mechanické problémy spojené s opotřebením.
Bezkartáčový DC motor (BLDC) je stejnosměrným elektrickým motorem s permanentními magnety umístěnými na rotoru a statorem generujícím točivé magnetické pole. Na rozdíl od kartáčového motoru tudíž k otáčení hřídele nevyžaduje kluzné elektrické kontakty (kartáče). Ve výsledku to vede ke sníženému mechanickému odporu a menší náchylnosti k jiskření, což se také podepisuje na výrazně jednodušší údržbě.
Velmi podobně je na tom i krokový motor, který se od bezkartáčového stroje liší tím, že stator není napájen po celou dobu, ale pro účely rotace či k dosažení přesné pozice, budou cyklicky využívány různé elektromagnety. V případě bezkartáčového motoru nemá rotor vinutí, ale využívá permanentní magnety, zatímco se mění magnetické pole generované vinutími na statoru.
Vzhledem k tomu, že motor pracuje na stejnosměrný proud, bude k zajištění otáčení magnetického pole generovaného statorem zapotřebí elektronický obvod tvořený řadou výkonových tranzistorů řízených mikrokontrolérem. Systém pak reguluje spínání proudu, řeší jeho inverzi a na základě toho i požadovanou rotaci magnetického pole.
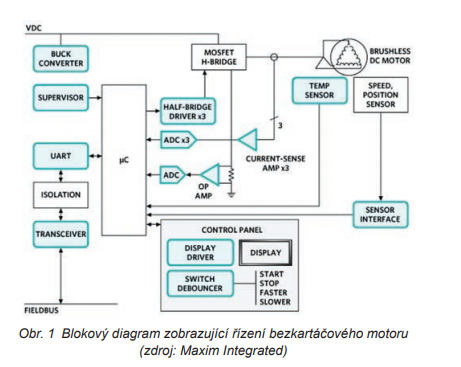
Kontrolér musí znát polohu rotoru, abychom tak mohli u statoru stanovit orientaci magnetického pole, takže se v zapojení obvykle využije čidlo pracující na principu Hallova jevu. Účinnost zmíněných strojů bývá obecně vyšší, než je tomu v případě asynchronních motorů – viz také obr. 1.
BLDC motory jsou konkrétním typem synchronního motoru. To znamená, že magnetické pole generované rotorem a statorem bude na stejném kmitočtu. BLDC motory pak dále členíme do tří kategorií – jako jednofázové, dvoufázové a třífázové, což také odpovídá počtu vinutí na statoru.
Motory a jejich řízení
Budiče motorů pokrývají potřeby celé řady aplikací v nejrůznějších průmyslových a také civilních oblastech – zejména pak ve světě elektronických přístrojů a rozličných počítačových periférií. Každý ze způsobů využití bude mít z hlediska výkonu a potřebných charakteristik odlišné požadavky, kterým je zapotřebí vyhovět. Jedná se např. o krouticí moment, otáčky a otázku testování. K některým požadavkům, s nimiž se musí umět řídicí systém vypořádat, patří změna polohy nebo rychlosti otáčení. Pro takové účely pak nacházíme řadu řídicích modulů navržených pro stejnosměrné a také krokové motory.
DC motor se uplatňuje v automatizaci a robotice. Jeho princip je založen na vzájemném působení dvou magnetických polí, přitažlivosti a odpudivé síle (stator a rotor). S krokovým motorem se pak potkáváme v přesných aplikacích, kde také ke své činnosti vyžaduje pulzy. Servomotor bude na druhou stranu elektromechanickým systémem vybaveným mechanickou částí a zpětnovazební elektronikou pro účely ovládání. Aby mohl vykonávat svou specifickou činnost, neobejde se bez náležitého řídicího systému.
Budiče jako integrované obvody
Vývojáři čelí rostoucímu tlaku na to, aby dále zvyšovali účinnost svých řešení a mohli proto v konkurenčním prostředí vynikat. Něčeho takového mohou např. dosáhnout snižováním celkové spotřeby energie a optimalizacemi během řízení teploty. V případě motorů bude primární funkce spočívat ve spínání, tedy přivedení proudu do vinutí motoru přesně v tom správném čase. Spínání je pak řízeno algoritmy naprogramovanými v mikrokontroléru či digitálním signálovém procesoru DSP. Algoritmy pro řízení motorů jsou, obecně vzato, velmi složité, protože zde musíme při spínání činit správná rozhodnutí, a to za odlišných zatěžovacích podmínek stroje.
Prvky, se kterými bude možné zjednodušit své projekty, zahrnují integrované výkonové MOSFETy a také architekturu napájení s mimořádně nízkou vlastní spotřebou, takže bude možné zajistit integrované proudové omezení a flexibilní režim regulace proudu. Skvělých výsledků navíc dosáhneme díky monitorování a bezpečnostním funkcím, jako jsou ochrana proti přepětí, zkratu či nadměrné teplotě, společně s diagnostikou pro případ poruchy.
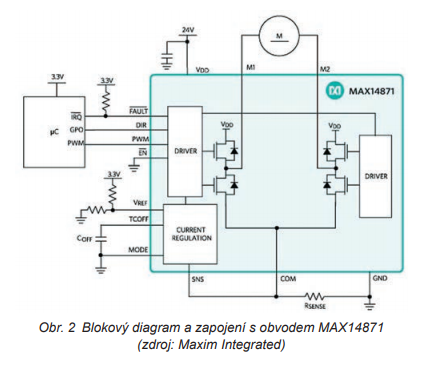
Integrovaný obvod MAX14871 [3], budič motoru v konfiguraci s plným můstkem, nabízí nízkopříkonové řešení s napětím v rozmezí od 4,5 až do 36 V. Budič snižuje výkonovou ztrátu a nabízí řešení bez nábojové pumpy zajišťující menší počet vnějších součástek a také malý proudový odběr. Integrované proudové řízení vyžaduje minimum externích prvků a zahrnuje též i tři režimy regulace proudu – viz obr. 2.
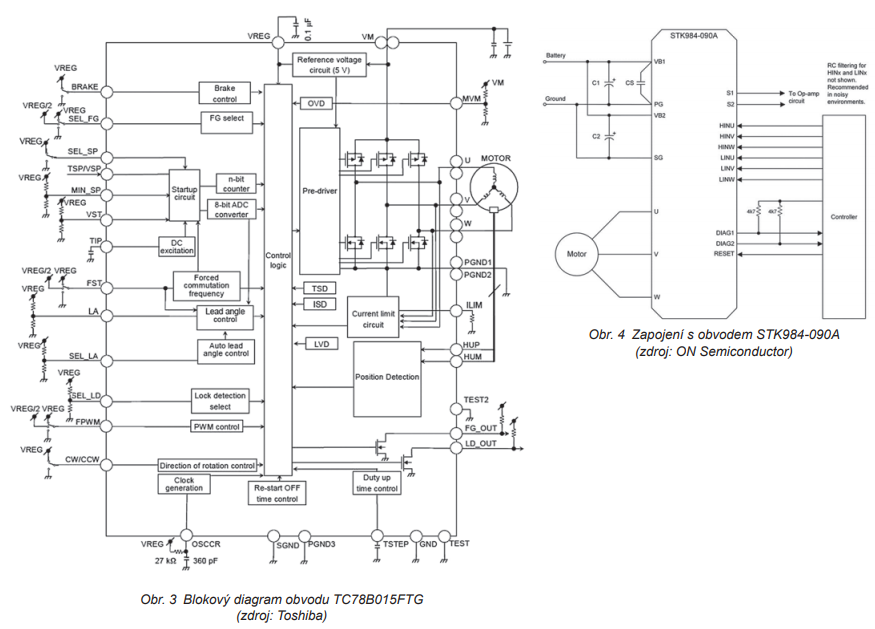
S ohledem na rostoucí potřebu energetických úspor a tichý běh motoru v nejrůznějších aplikacích se budou mnohdy hodit bezkartáčové DC motory (BLDC). Aby mohly zlepšit účinnost, těží kontroléry od společnosti Toshiba z technologie InPAC (Intelligent Phase Control). Technologie InPAC pracuje se vztahem mezi fází proudu (proudová informace) a fází napětí (signál poplatně Hallovu jevu), kdy ve spojitosti s proudovým řídicím signálem u motoru zajišťuje zpětnou vazbu pro automatické nastavení fáze. Integrované obvody TC78B0 od Toshiby jsou navržené pro řízení rychlosti otáčení motoru na základě změny pracovního cyklu s pulzně-šířkovou modulací. Zmíněné součástky přichází s třífázovým celovlnným řízením, sinusovým řízením s PWM, detekčním obvodem pro případ výskytu nadproudů a také obvody teplotní pojistky.
Verze TC78B015FTG [4] pracuje s napájecím napětím mezi 6 a 22 V, zatímco varianta TC78B015AFTG požaduje napájení od 6 do 30 V. Obě součástky si poradí s výstupními proudy až do 3 A a podporují též prvky založené na Hallově jevu. Stejně tak nabízí i řadu ochranných funkcí, včetně teplotní pojistky, odhalení nadproudů či detekce blokování motoru – viz obr. 3.
Společnost ON Semiconductor nabízí svůj třífázový budič STK984-090A [5] s výkonovými MOSFETy pro bezkartáčové DC motory. Verze STK984-090A-E bude mít k dispozici vlastní bočník a termistor. Výrobce rovněž pamatoval na různé ochranné funkce pro případ teplotního přetížení, nadproudů, přepětí a také nízkého napětí. Zapojení sloužící k buzení BLDC motoru tak může být efektivně navrženo i na desce plošného spoje s omezenou velikostí – viz obr. 4.
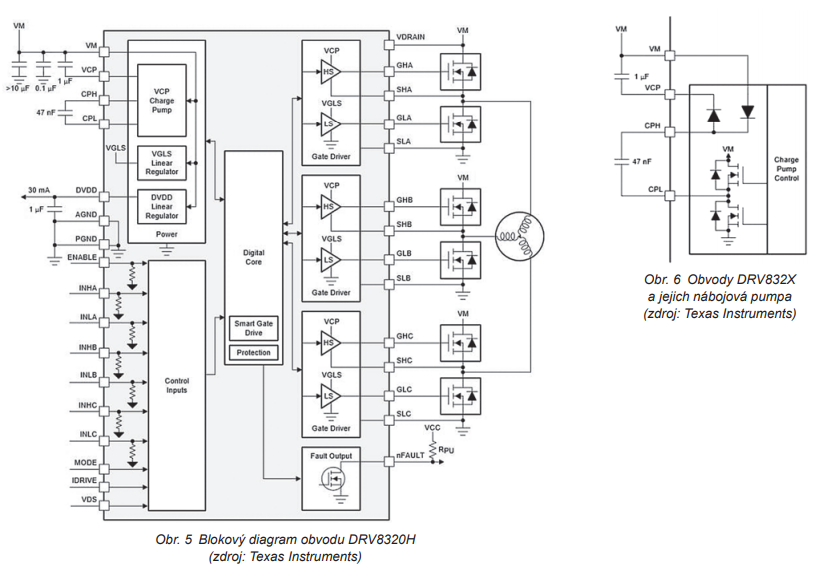
Aby ve firmě Texas Instruments pomohli v aplikacích pro řízení motorů snížit rozměry a také hmotnost, navrhli budiče hradel DRV832x [6]. Takové obvody jsou založené na architektuře s chytrým buzením hradla, která se obejde bez spousty klasických součástek. Řešení umožňuje definovat řídicí proud tak, abychom optimalizovali výkonovou ztrátu a dostáli i požadavkům z hlediska elektromagnetické kompatibility. Budiče jsou k dispozici s nebo také bez snižujícího měniče, příp. se třemi integrovanými zesilovači pro snímání proudu s využitím bočníku. Pokaždé je k dispozici též i varianta se sériovým rozhraním pro diagnostické účely – viz obr. 5 a obr. 6.
Závěr
BLDC motory nabízí oproti tradičním řešením spoustu výhod. Vývoj silných magnetů dále umožnil výrobu BLDC motorů se stejným výkonem, jako je tomu v případě kartáčových motorů, ovšem v menším provedení. Způsob řízení motoru navíc umožňuje zlepšit účinnost již ve fázi návrhu. Pokud pochopíme potřeby při řízení každého typu stroje a také nejlepší způsob vhodný pro danou aplikaci, bude možné dosahovat vyšší efektivity v jakékoli další souvislosti.
Moderní mikrokontroléry se společně s budiči hradel skvěle hodí pro zajištění odpovídající úrovně výkonu a také výpočetních funkcí nezbytných při vývoji vysoce účinných řídicích smyček. Řízení motorů je s průmyslovými projekty zkrátka neodmyslitelně spojené – zvláště pak u robotických systémů a číslicově řízených strojů, stejně jako u celé řady dalších přesných pohonů.
