

 Vítejte, dnes je
středa
08.
duben
2026
Vítejte, dnes je
středa
08.
duben
2026
Rychlost a pozvolný rozběh malých střídavých asynchronních motorů, např. při otevírání garážových vrat, lze ovládat levným třífázovým obvodem se střídačem. Tyto motory s trvale připojeným rozběhovým kondenzátorem jsou pro tento účel nejjednodušší a používají se nejčastěji. Mají malý počáteční točivý moment a proud, ale neefektivní polarizovaný kondenzátor často selže. Na tento typ jednofázových motorů je často odkazováno jako na dvoufázové motory, protože nemohou fungovat bez dostatečného fázového posuvu mezi dvěma vinutími. Kondenzátor je umístěn na vstupní signál a vinutí tak, aby se vytvořil fázový posuv přibližně 90°.
Přepínač často nahrazuje relé, které ovládá směr přepínáním mezi fázemi. Hodnota kondenzátoru je většinou dána výrobcem motoru a pro motory o výkonu méně než 0,75 kW, na které se zde zaměřujeme, je v rozmezí 5–50 μF. Výběru kondenzátoru je potřeba věnovat pozornost, aby se výsledným účiníkem dosáhlo co nejvyšší energetické účinnosti. Na obr. 1 je zapojení běžného střídavého asynchronního motoru.
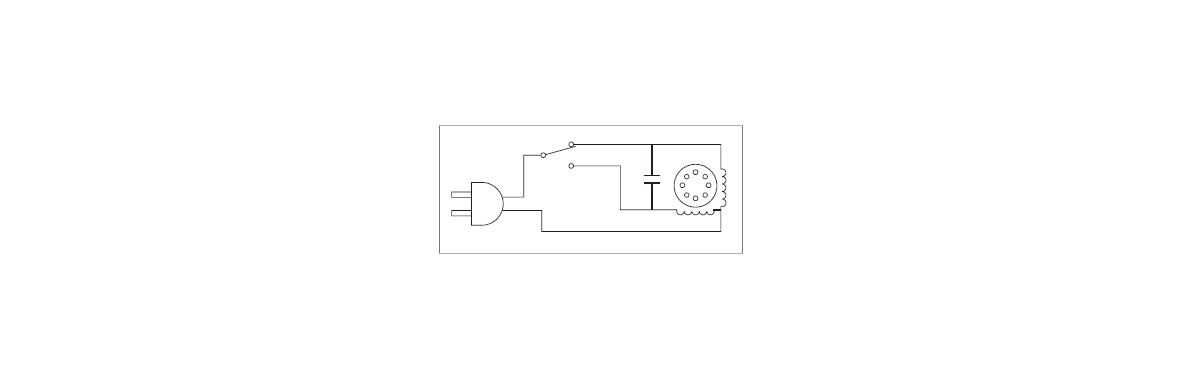
Obr. 1 Zapojení běžného střídavého asynchronního motoru; kondenzátor zajišťuje nezbytný fázový posuv a tvoří rotující magnetické pole.
V závislosti na vstupním napětí je vysoké jmenovité napětí většinou od 220 do 450 V. Kondenzátor nesmí být polarizovaný, protože je připojen na střídavé napětí. Pokud kondenzátor selže, motor se přestane točit. Výběr správného kondenzátoru je tedy rozhodující.
Reálný kondenzátor má odpor a na jeho náhradním sériovém odporu dochází ke spotřebě zvlněného efektivního střídavého proudu a vyzařuje tedy teplo. Permanentně zapojeným kondenzátorem přicházíme o počáteční točivý moment výměnou za vyhlazení zvlněné charakteristiky točivého momentu během chodu. Kvůli vysoké VA charakteristice kondenzátoru se ten často vybírá tak, aby se splnily podmínky pro minimální počáteční výkon, a to způsobuje malou účinnost během chodu.
U motorů s rozdílným vinutím je potřeba napájet obě fáze jiným napětím. Tato nesouměrnost je způsobena přítomností kondenzátoru, který spolu s cívkou motoru tvoří rezonanční obvod. Následně se tvoří napětí na jednom z vinutí, a to způsobuje nestejnoměrný tok proudu.
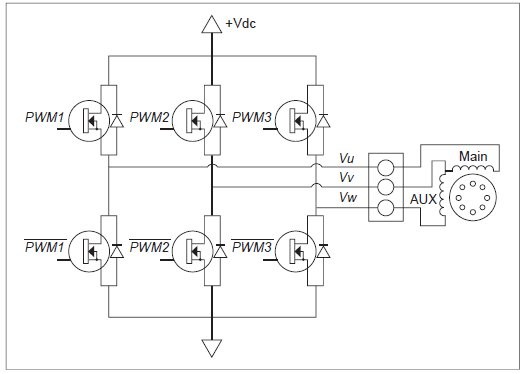
Obr. 2 Jednofázový střídač se třemi polomosty; šest PWM signálů je použito k řízení připojeného klecového vinutí asynchronního motoru.
Nicméně místo kondenzátoru lze použít třífázový střídač (viz obr. 2). Toto řešení umožňuje přizpůsobit rychlost motoru za použití odpovídajícího napětí pro každé vinutí, takže slabší vinutí nejsou přebuzena.
Motor se bude stále točit i bez kondenzátoru, když je každá cívka buzena fází té druhé. Toho se dá dosáhnout vytvořením tří virtuálních fází. Tato třífázově posunutá napětí lze poté vztahovat tak, aby se ve výsledku vytvořily dvě napěťové vlny na dvou vinutích motoru. Jedna fáze bude brána jako referenční nebo neutrální. Tři virtuální fáze lze vytvořit použitím PWM metody.
Pro porovnání chodu asynchronních motorů s permanentním kondenzátorem, asynchronních motorů se střídačem a asynchronních motorů bez rozběhového kondenzátoru lze použít tři typy měření:
Tyto tři testy poukazují na nejdůležitější části návrhu obvodů k řízení motorů. Žádné z měření nevyžaduje složitější přístup ani nastavení než ostatní testy a všechny analýzy těchto testů mohou využít stejnou podmnožinu dat. Zapojení měření je zobrazeno na obr. 3.
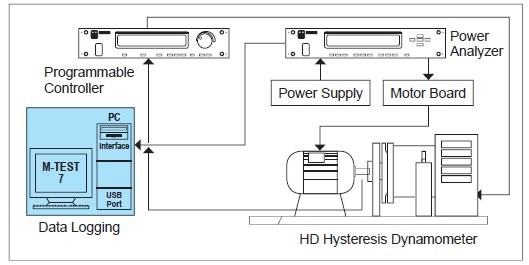
Obr. 3 Zapojení měření siloměrem
V tomto testu byl použit jednofázový 0,19kW motor s vyváženým uspořádáním vinutí. Obě vinutí měla stejný odpor i indukčnost. K měření rychlosti hřídele byla použita Hallova sonda. Na vstupu bylo jednofázové napětí 220 V při 60 Hz vedené dvoužilovým kabelem. Výstup byl veden do dvou svorek na střídači.
Na počítači byl spuštěn program Magtrol’s M-Test 7. Programovatelný ovladač nastavil měřicí parametry na siloměru a odečítal nastavený točivý moment. Multimetrem se odečítaly a zaznamenávaly ostatní hodnoty.
Začali jsme testem točivého momentu a bylo patrné, že nejvyšší počáteční točivý moment byl kolem 0,75 Nm v rozmezí 50 až 60 Hz podle konstrukce motoru. Točivý moment při frekvencích nad a pod 60 Hz byl velmi nízký. Navíc měření nízkých frekvencí nevykreslovalo konstantní křivku točivého momentu a u frekvencí nižších než 60 Hz bylo potřeba jemného dolaďování poměru napětí-frekvence, kvůli ztrátám a nepřesnostem ovladače motoru. Frekvence pod 60 Hz byly udržovány s maximálním napětím.
Nízká frekvence způsobuje pokles impedance cívky. Vysoké napětí působící na tuto sníženou impedanci zvyšuje proud do statoru, který vytváří vyšší točivý moment. Jemné dolaďování se používá k linearizaci křivky točivého momentu.
Tvary křivek dvou zapojení motoru se velmi liší. Zapojení s rozběhovým kondenzátorem vykazuje mírně vyšší počáteční točivý moment a zrychluje rychleji než zapojení se střídačem při 60 Hz. Zapojení se střídačem má křivku točivého momentu podobnou konstrukci motorů třídy D, zatímco asynchronní motor s permanentně zapojeným kondenzátorem tvoří křivku točivého momentu podobnou motorům třídy A. Proměnlivá velikost napětí způsobená permanentním kondenzátorem vytváří proměnlivý magnetický tok ve statoru. Zapojení střídače slouží k vytvoření stejné velikosti proudu pro každé vinutí, pokud má motor v každém vinutí stejnou impedanci. Křivky točivých momentů nejsou stejné kvůli nesrovnalostem v topologii řízení.
Podívejme se na počáteční točivý moment, když je rotor zabrzděný. Motor se střídačem by nebyl schopen zvednout zátěž o stejné váze, jakou by motor s permanentním kondenzátorem zvedl, pokud by byl motor naprogramován pouze pro modulaci o frekvenci 60 Hz. Nicméně obvod se střídačem je koncipován tak, aby mohl využívat řízení proměnnými frekvencemi, a tím pádem zvedne i větší zátěže. Konstruktér musí také volit kompromis mezi vysokým počátečním točivým momentem vůči účinnosti a rychlosti.
Velkou výhodou ovládání napětí a frekvence je, že konstruktér může řídit rychlost, jakou se hřídel motoru otáčí. Čím rychleji se otáčí, tím rychleji je náklad vytažen nebo vytlačen na své místo. Toto může být rozhodující aspekt při navrhování systému pro brány nebo garážová vrata.
Panel se střídačem předčí motor řízený zapojením s permanentním kondenzátorem. Zapojení s permanentním kondenzátorem může být řízeno pouze jednou frekvencí, a proto nemůže překročit synchronní rychlost motoru.
Panel se střídačem lze navrhnout spíše jako specificky naprogramovaný obvod než obecně naprogramovanou desku. Nicméně se tím tvoří několik vstupů a výstupů (I/O), se kterými musí uživatel pracovat a upravovat je. Střídač je konstruovaný tak, aby řídil jednofázový nebo třífázový asynchronní motor. Blokové schéma desky s použitím mikroprocesoru PIC16F1509 firmy Microchip je na obr. 4.
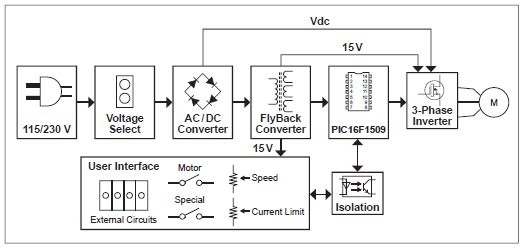
Obr. 4 Blokové schéma celého systému
Při navrhování obvodu se myslelo na flexibilitu a některé z částí obvodu mohou, ale nemusejí, být využity, aby se dosáhlo optimálního stavu. Nejvíce I/O se řídí podle základního nastavení, ale stále je zde mnoho prostoru pro vývojáře k aplikování vlastních úprav. I2C linky jsou využitelné pro jakékoliv přídavné pomocné zařízení.
Některé I/O jsou sloučeny na jeden vstup, aby se zvýšil počet I/O, které se dají využít. Všechna oznámení uživatelského rozhraní jsou vyvedena na dva čtyřkanálové a jeden jednokanálový optočlen.
Panel obsahuje dvě přepínací tlačítka a dva potenciometry. Jsou zde také dvě sběrnice k připojení všech I/O jako koncových spínačů. Potenciometry jsou zapojeny s optočleny a tranzistory a tranzistory pracují v zesilovací oblasti. Výstup je tedy pouze téměř lineární, protože optočleny tvořené LED diodami nemají lineární VA charakteristiku. Každý potenciometr spotřebuje proud v rozsahu 30 mA.
Koncové a pomocné senzory jsou zapojeny tak, aby způsobovaly přerušení při změně stavu (IoC). Mikroprocesor potom nemusí stále kontrolovat napětí na vstupech. Kdykoliv je detekován signál IoC, je provedeno čtení z AD převodníku, aby se určilo, co způsobilo přerušení.
Motor je v klidovém stavu, když mikroprocesor PIC16F1509 inicializuje svorky a zastaví motor. Při stisknutí tlačítka start se motor pomalu rozběhne použitím pomaluběžného startu, kdy se lineárně nastavuje napětí a frekvence až do pomalu nastávající pracovní rychlosti motoru. Poté, co skončí rozběhová sekvence, se motor přepne do stavu „zapnuto“.
Rychlost motoru a současné fáze posunutí jsou neustále kontrolovány hlavní smyčkou programu. Pokud je zaznamenán nadproud, motor se zastaví a LED diody indikující chybu se rozblikají. Motor se normálně zastavuje stisknutím tlačítka brzdění nebo se pomalu zastaví a navrátí do klidového stavu.
Asynchronní motory používané u garážových vrat je lepší ovládat střídačem než běžným kondenzátorem. Tím je umožněno ovládání rychlosti a může se přidat i funkce pomaluběžného startu za poměrně nízkou cenu. Deska střídače je založena na osmibitovém mikroprocesoru PIC16F1509 od firmy Microchip.

