

 Vítejte, dnes je
neděle
15.
březen
2026
Vítejte, dnes je
neděle
15.
březen
2026
V různorodých aplikacích průmyslové automatizace se nejčastěji používají dva druhy čidel: fotoelektrická a indukční (přiblížení). Oba mají své nedostatky a přednosti, které určují jejich použití. A tak na příklad zatímco indukční čidlo může detekovat kovové objekty ukryté za neprůhlednou, nekovovou překážkou, pak fotoelektrické čidlo, které musí objekt v jistém rozsahu světla „vidět”, takovou možnost nemá. Z druhé strany, pokud v takovém čidle použijeme laserové světlo, může být dosah detekce velmi velký, dosahující až několika desítek metrů. Takovým dosahem se již indukční čidla pochlubit nemohou.
Fotoelektrické čidlo funguje na principu měření intenzity světelného paprsku, který emituje vysílač, dopadajícího na světlocitlivý prvek přijímače. V závislosti na určení čidla se používají různé druhy světla a světlo se moduluje. Nejčastěji se používá infračervené světlo, neviditelné pro lidské oko. Díky tomu může detekce probíhat způsobem nevzbuzujícím pozornost, ale má to také své nedostatky, o čemž se přesvědčil každý, kdo instaloval např. čidlo u brány, které má za úkol zabránit jejímu zavření, pokud v ní stojí auto. Proto se často při provádění montážních prací používají jako doplňkové příslušenství laserová ukazovátka, která usnadňují nastavení vzájemné polohy vysílače a přijímače.
Mnoho fotoelektrických čidel je vybaveno diodami signalizujícími správnou spolupráci vysílače a přijímače. Sledování těchto diod a barev jejich svitu usnadňuje montáž čidel a zjištění stavu výstupu nebo správné reakce na objekt, což je zvláště důležité, je-li citlivost regulována.
Téměř každý konstruktér-elektronik, projektant automatizace nebo integrátor, neboť právě on nejčastěji použije fotoelektrické čidlo, bude snadno schopen posoudit požadavky cílové aplikace a vybrat vhodný druh sensoru. Důležitými kritérii budou jistě takové faktory, jako je pracovní prostředí čidla, teplota okolí, mechanická odolnost (a všechny uvedené faktory budou mít vliv na výběr materiálu pouzdra, stupně krytí IP a způsobu upevnění), druh světla v okolí, určení čidla a požadovaný dosah detekce, dostupné napájecí napětí nebo druh výstupu. V některých aplikacích bude mít velký význam reakční doba čidla, i když ne právě toto budeme očekávat u čidla s velkým dosahem. Nesmírně důležitým kritériem bude také druh detekovaného objektu nebo objektů. Některá čidla reagují již tehdy, když se v dráze paprsku mezi vysílačem a přijímačem objeví tenká průhledná fólie. Jiná vyžadují téměř zcela neprůhledný objekt. Ještě jiná mají potenciometr pro nastavení citlivosti, díky kterému lze přesně nastavit práh sepnutí.
Při výběru čidla stojí za to se také řídit značkou. Pro průmyslová použití nebo jiná zařízení, u nichž je důležitá spolehlivá funkce čidla, a to nejen s ohledem na bezpečnost uživatelů, ale také na komfort užívání aplikace, je vhodné sáhnout po výrobcích známých výrobců. Pokud je výrobcem sensoru na příklad firma Panasonic, lze předpokládat, že byla provedena spolehlivá kontrola kvality sensorů a ty budou pracovat jistě a stabilně.
Podívejme se, jak lze v praxi zapřáhnout do práce takové čidlo ve spojení s libovolným programovatelným automatem PLC. I když byl příkladový program vytvořen pro Siemens LOGO! v8, tak díky čitelnosti FBD jej lze bez velké námahy přizpůsobit k použití na jiné platformě.
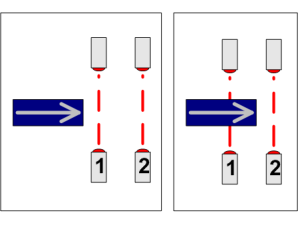
Máme-li jedno fotoelektrické čidlo, je velmi obtížné rozpoznat směr pohybu objektu. Aby se to dalo udělat, musel by se světelný paprsek modulovat a využít Dopplerův efekt, nebo měřit doba mezi sériemi impulsů vysílanými směrem k objektu. Jsou to však metody prakticky obtížně realizovatelné, spíš drahé a ne každý si s nimi poradí. Značně jednodušší je umístit dvě čidla jedno vedle druhého a sledovat pořadí jejich sepnutí.
Na Obrázku 1 je zobrazen princip funkce takového řešení. Použijeme-li dvě čidla – očíslujme si je jako „1” a „2” – pak sepnutí „1” a následně „2” může značit dohodnutý směr pohybu vpravo a v opačném pořadí – vlevo. Avšak aby náš algoritmus fungoval spolehlivě a dal se použít nejen pro detekci směru pohybu, ale také např. pro počítání objektů, musíme zavést ještě jistá opatření. Zaprvé, objekt se musí pohybovat před čidly tak, aby vyvolal jejich sepnutí, ale to je jaksi zřejmé. Zadruhé, maximální vzdálenost mezi čidly nesmí být větší než nejmenší rozměry objektu. Díky tomu budou naše čidla spínat v pořadí, na příklad:
obě neaktivní → „1” sepnutý → „1” a „2” sepnuté → „2” sepnutý → obě neaktivní.
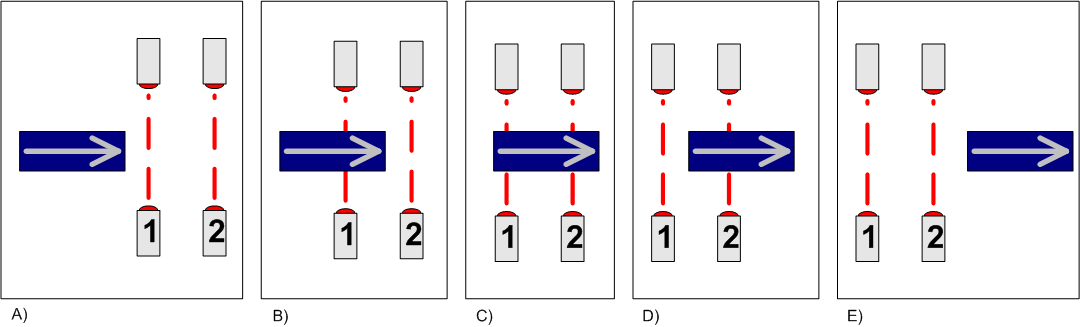
Obrázek 1. Princip funkce detektoru detekujícího směr pohybu: A) klidový stav – objekt se blíží k čidlům zleva,
B) aktivní čidlo „1”, C) aktivní čidla „1” a „2”, D) aktivní čidlo „2”, C) klidový stav
Zatřetí, případné pohyby kontrolovaného objektu mezi čidly nesmí způsobit chybnou funkci instalace. Je jasné, že to je program a nedají se vyloučit všechny logické chyby, ale mimo to je třeba jej pečlivě zkontrolovat pomocí simulátoru nebo modelové instalace a otestovat tak algoritmus v různých situacích, jaké mohou v praxi nastat.
Na Obrázku 2 je uveden příklad programu v jazyku FBD napsaný v prostředí LOGO! Soft Comfort, které je zdarma. Pokud bychom použili kontrolér LOGO!, je třeba na jeho vstupy I1 a I2 přivést napětí reprezentující logickou „1”. Pokud by to bylo LOGO! 24RC, pak by se jednalo o napětí v rozmezí 18…24 V DC. Pokud bychom použili verzi napájenou střídavým napětím 230 V AC, pak logickou „1” reprezentuje značně vyšší napětí, ale pak pozor na druh a parametry výstupu sensoru!
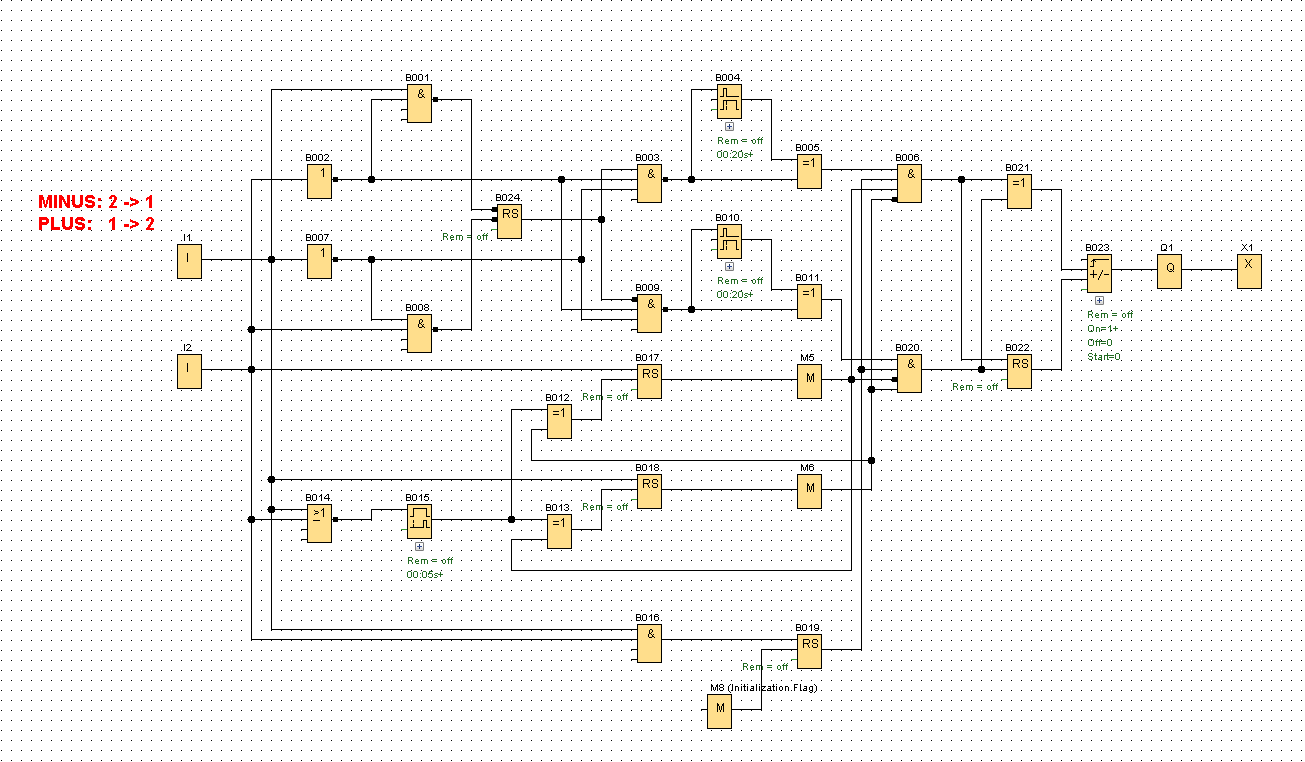
Obrázek 2. Příklad programu napsaného v jazyku FBD pro kontrolér LOGO! v8
Jak bylo uvedeno, musí být napětí z kontaktů čidel přivedeno na vstupy I1 (z čidla „1”) a I2 (z čidla „2”). Program je napsaný tak, že směr pohybu od I1 k I2 způsobí vygenerování impulsu na výstupu hradla B020, zatímco od I2 k I1 na výstupu hradla B006.
Abychom předvedli užitečnost příkladové aplikace, připojili jsme k výstupům obou hradel dvousměrný čítač (B023) a logický obvod (B021 – hradlo XOR, B022 – klopný obvod RS). Úkolem logického obvodu je nastavit do „1” vstup směru čítání, když přijdou „kladné” impulsy (z hradla B020), a vynulovat směr (nastavit do „0”), když záporné (z hradla B006), a vytvořit hodinový průběh přiváděný na čítací vstup. Díky nastavování a nulování vstupu směru čítání čítá čítač nahoru (vstup v „1”) nebo dolů (vstup v „0”).
Blok čítače Up/Down Counter u LOGO! má výstup nastavován a nulován podle podmínek zadaných v okně vlastností čítače. Jestliže, jak vidíme na Obrázku 3, do pole „On” zapíšeme „1” a v poli „Off” ponecháme „0”, tak výstup bude v jedničce, pokud bude stav čítače větší než 0, a v nule, bude-li roven 0. Jestliže nyní k tomuto výstupu připojíme funkční blok Output, např. Q1, pak výstupní relé číslo 1 kontroléru LOGO! 24RC bude spínat kontakty, když bude stav čítače větší než nula. Tímto způsobem můžeme rychle a snadno sestavit zařízení, které bude automaticky zapínat a vypínat osvětlení, počítat osoby vcházející a vycházející do/z dané místnosti. Světlo se má zapnout, pokud někdo vejde, a vypnout, když všichni odejdou.
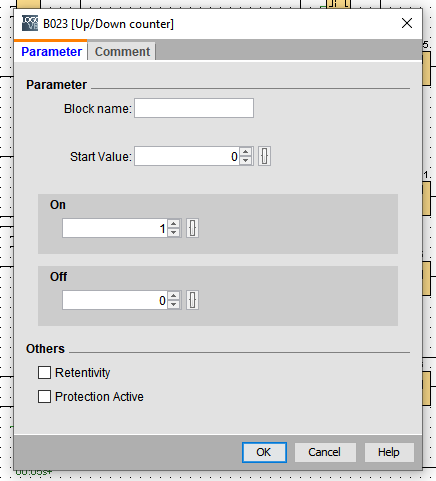
Obrázek 3. Okno vlastností bloku čítače Up/Down Counter
Odkaz na web TME

