
 Vítejte, dnes je
neděle
26.
červenec
2026
Vítejte, dnes je
neděle
26.
červenec
2026

Bezsenzorové řízení BLDC motorů pro široké využití
Bezkartáčové stejnosměrné motory (BLDC), které nabízí konstantní nebo proměnnou rychlost pohonu a disponují vysokou spolehlivostí a snadným ovládáním, jsou možným technologickým řešením pro řadu systémů vysokého a středního rozsahu. Při zařazení pouhých několika málo Hallových sond však celkové náklady vzrostou natolik, že v nízkonákladových aplikacích nepřipadá využití BLDC motorů v úvahu. Také u dřívějších pokusů o bezsenzorové řízení bylo uplatnění v hromadném měřítku omezeno vysokou cenou, protože algoritmy používané místo senzorů vyžadují nákladné řadiče.
S příchodem digitálních regulátorů (DSC), jakými jsou např. obvody dsPIC33FJ15MC102 společnosti Microchip, u nichž se náklady na jednotku blíží jednomu dolaru, lze výše uvedené potíže překonat a bezsenzorové řízení BLDC motorů uplatnit i v nízkonákladových aplikacích.
BLDC motor vybavený senzory
Abychom pochopili funkci bezsenzorového řízení BLDC motorů, probereme si nejprve základní model se senzorovým řízením.
Stejnosměrný motor bez komutátoru používá napájené vinutí (stator), které vyvolává pohyb permanentního magnetu na rotoru (hřídel) vůči vinutí. Otáčením rotoru vzniká točivý moment. V třífázovém BLDC motoru má stator tři vinutí, do nichž se při otáčení rotoru postupně zapínají a vypínají tři fáze. Aby bylo otáčení rotoru plynulé, pro každou statorovou cívku nebo fázi motoru se používá větší počet vinutí a každá fáze se musí být zapínat a vypínat ve specifickém pořadí. To je principem otáčení rotoru. Poloha rotoru určuje, která fáze se musí zapnout nebo vypnout. Proto je důležité, aby poloha rotoru byla známa a regulátor mohl aktivně zapínat a vypínat fáze, což umožňuje činnost BLDC motoru. Nejjednodušší způsob, jak zjistit polohu rotoru, je použít Hallovy sondy. Ty generují impulsy, jež umožňují regulátoru určit polohu rotoru. Po zjištění polohy rotoru stačí, aby si základní regulátor BLDC vyhledal diagram pro tři fáze, který bude odpovídat poloze rotoru, a fáze přepnul podle tohoto diagramu.
Bezsenzorový BLDC motor
Podrobnější pohled na tři fáze BLDC motoru může vysvětlit, jak může algoritmus bezsenzorového BLDC určit polohu rotoru.
Při lichoběžníkovém řízení se v jednom okamžiku jedna fáze zvedá (+VBUS), druhá fáze klesá (–VBUS) a třetí fáze je neaktivní. Průběh každé fáze má tvar lichoběžníku (viz obr. 1). Když rotor projde fází, permanentní magnet na rotoru indukuje v této fázi proud, který vytvoří napětí známé pod názvem zpětná elektromotorická síla (EMF). Ta je závislá na počtu závitů otáček ve vinutí každé fáze, na úhlové rychlosti rotoru a síle permanentního magnetu rotoru. Zpětná elektromotorická síla každé fáze se vztahuje k poloze rotoru, takže ji lze použít k určení jeho pozice.
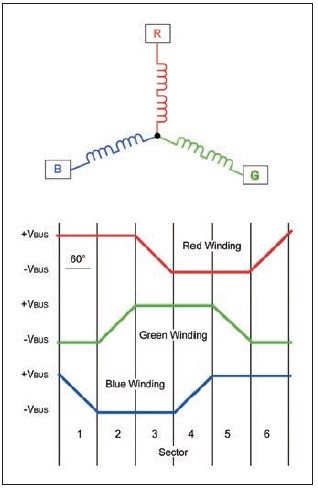
Obr. 1 Vinutí motoru a lichoběžníkové průběhy
Přestože existuje řada způsobů, jak použít zpětnou elektromotorickou sílu k určení polohy rotoru, jednou z nejčastějších a nejspolehlivějších metod je detekce průchodu nulou. Když jeden ze signálů zpětné elektromotorické síly projde nulou, regulátor musí přepnout diagram fází. Tento proces, známý jako komutace, je znázorněn na obrázku 2. V zájmu zachování otáček rotoru se musí mezi bod, v němž dochází k přechodu nulou, a bod, kdy dochází ke komutaci, zařadit fázový posun. Výpočet a kompenzaci musí provést regulátor. Jednoduchý způsob realizace průchodu nulou je založen na předpokladu, že k průchodu nulou dojde pokaždé, když zpětná elektromotorická síla dosáhne na některé z fází úrovně VBUS/2.
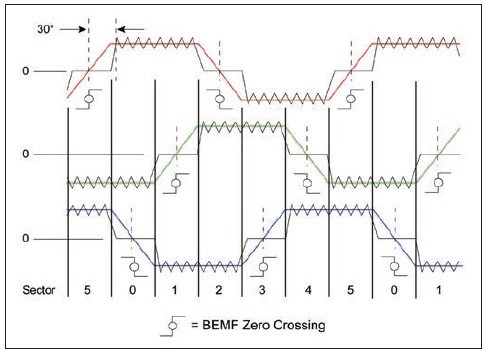
Obr. 2 Zpětná elektromotorická síla a průchody nulou
Tuto metodu lze snadno realizovat několika operačními zesilovači, které jsou nakonfigurovány jako komparátory. To však představuje řadu problémů: Zpětná elektromotorická síla je typicky nižší než VBUS, takže při úrovni VBUS/2 se průchody nulou nemusí uskutečnit. Navíc vlastnosti každé fáze mohou být rozdílné, takže zpětná elektromotorická síla pro průchod nulou se na jedné fázi může od jiné fáze lišit. Kromě toho tato zjednodušující metoda snímání způsobuje ve snímaných signálech zpětné elektromotorické síly kladné a záporné fázové posuvy.
BLDC v reálném světě
V praktických aplikacích se prahové napětí průchodu nulou výrazně mění. Toto proměnné prahové napětí se však rovná napětí neutrálního (mrtvého) bodu motoru, protože neutrální bod motoru je průměrem zpětné elektromotorické síly ze všech tří fází. Jakmile tedy zpětná elektromotorická síla libovolné fáze dosáhne neutrálního (mrtvého) bodu motoru, proběhne průchod nulou a regulátor musí komutovat. To lze uskutečnit prostřednictvím rezistorů a operačních zesilovačů nebo pomocí modulu ADC a softwaru regulátoru. S programovatelným regulátorem (například dsPIC® DSC) lze zpětnou elektromotorickou sílu pro každou fázi modulem ADV navzorkovat a neutrální (mrtvý) bod snadno obnovit v softwaru použitím průměru ze tří signálů zpětné elektromotorické síly. Software pak může tuto hodnotu porovnat s nasnímanou hodnotou zpětné elektromotorické síly tří fází a určit dobu, kdy proběhne průchod nulou. Jakmile nastane průchod nulou, regulátor bude komutovat motor a proces se začne opakovat. Využití zpětné elektromotorické síly motoru k detekci průchodu nulou znamená, že ze systému lze bez výkonnostních kompromisů vyřadit senzory.
V praktických bezsenzorových systémech vznikají další problémy. Při malých rychlostech je zpětná elektromotorická síla velmi malá a její detekce velmi obtížná. Dokud se motor nezačne točit dost rychle a dokud nezačne generovat dostatečnou zpětnou elektromotorickou sílu potřebnou k provozu v bezsenzorovém režimu, regulátor musí pozici rotoru odhadovat. Softwarově programovatelný regulátor umožňuje spuštění systému přizpůsobit každé aplikaci, což může vliv tohoto problému minimalizovat. Dalším problémem je spínací šum z tranzistorů MOSFET. Během přepínání MOSFET kvůli změně napětí na každé fázi se do zpětné elektromotorické síly zanáší šum, který je snímán ADC modulem regulátoru. Aby se zpětná elektromotorická síla každé fáze obnovila přesně, je nutno tento šum odfiltrovat. Do digitálního procesoru je vestavěn DSP procesor, který snadno zvládne výpočty potřebné k zařazení digitálního filtru a dokáže tento spínací šum eliminovat. Pomocí softwarově programovatelného regulátoru lze také nalézt jednodušší řešení ostatních problémů, které jsou pro každou aplikaci specifické.
Snížení nákladů na vývoj
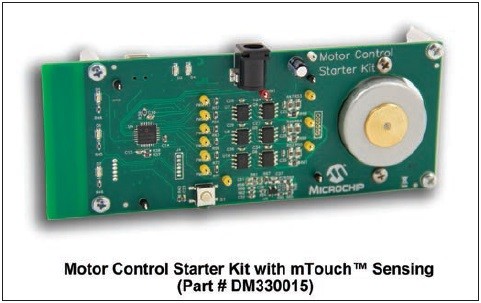
Nové vývojářské nástroje optimalizované pro bezsenzorové řízení bezkartáčových stejnosměrných motorů mohou výrazně snížit náklady a zkrátit dobu vývoje k zavedení bezsenzorových motorů v masovém měřítku a v dalších aplikacích. Startovací sada Microchip k řízení motoru znázorněná na obr. 3 stojí méně než 100 dolarů a obsahuje nejen podrobné poznámky k aplikaci, ale i příklady softwarových a hardwarových schémat. Dodavatelé regulátorů k motorům (včetně společnosti Microchip) umožňují také bezplatné stahování softwarových a hardwarových souborů, díky nimž je proces učení ještě snazší.
.jpg)
Obr. 3 Levná vývojová sada pro bezsenzorové motory BLDC (Motor Control Starter Kit mTouch™ Sensing – Part # DM330015)
Závěr
Digitální regulátory snižují náklady na řízení BLDC motorů. K jejich řízení lze použít digitální regulátory, jejich jednotková cena se blíží jednomu dolaru, a softwarové nástroje, které stojí méně než 100 dolarů. K dispozici je také bezplatné stahování softwaru, schémat a poznámek k aplikacím. To vše představuje dobré důvody, proč bezsenzorové BLDC motory začínají zaujímat své místo v nízkonákladových aplikacích pro masové využití.
